近年、ロボットによる自動化・省人化が急速に進んでいます。ハンドは、単なる付属機器ではなく、実際の自動化成否を左右する中核要素となっています。
しかし現場では、依然として「形状が不定」「配置がランダム」「対象が頻繁に変わる」といった理由から、自動化が進まない工程が多く残っています。特にピッキング工程は、従来のティーチングベースのロボットでは対応が難しい領域です。
こうした背景の中で注目されているのが、OmniPickerです。
本記事では、まずAgiBotというメーカーの技術的な特徴を整理します。そのうえで、OmniPickerの仕組み、関連製品ラインナップ、導入検討時のポイントまでを、SIer視点で詳しく解説します。
目次[]
Agibotとは

Agibotは、2023年2月に中国・上海で設立されたロボティクス企業で、人型ロボットを中心に開発を進める新興メーカーです。設立から短期間で急成長を遂げ、2024年には量産機を発表、2025年までに累計5,000台規模の出荷実績を達成しています。
同社の特徴は、単なるロボットハードウェアメーカーではありません。AIとロボット制御を統合した“実用志向のロボティクス企業”である点にあります。特に注目すべきは、従来のロボット開発で後回しにされがちだった「手(マニピュレーション)」の領域に対し、重点的に投資している点です。
同社の技術的強みは、以下の領域に集約されます。
- 3Dビジョンとディープラーニングによる物体認識
- 把持計画(Grasp Planning)の自動生成
- 大規模データを活用したロボット学習
この構成により、従来のように教示するのではなく、自ら判断するロボットを実現しています。
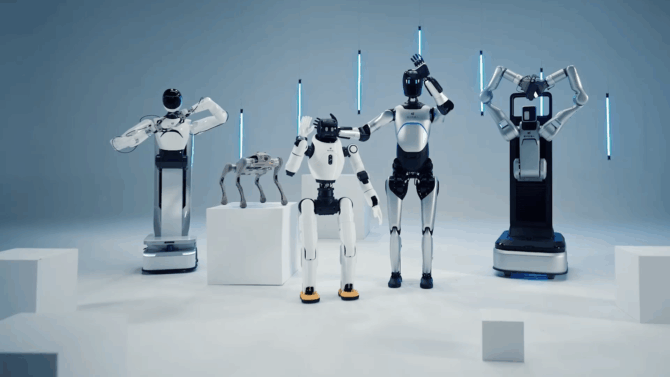
AgiBotヒューマノイドロボットの製品ラインナップ
AgiBotは、ヒューマノイドロボットを中心に、モバイルマニピュレータ、AIピッキング、ロボットハンドまでを一体で展開しています。特徴は、単一製品ではなく、「動く・認識する・掴む」を分解せず統合したラインナップ構成にあります。
以下では、主要製品群ごとに整理します。
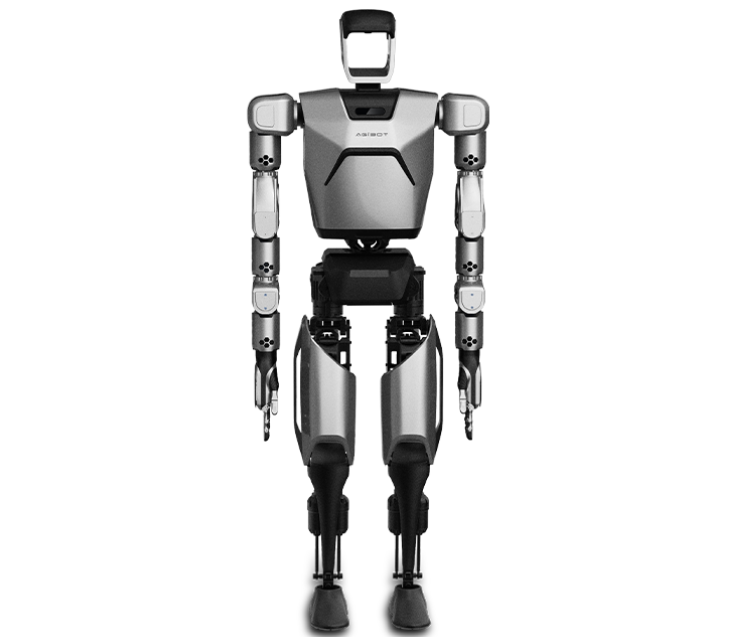
A2シリーズ(AgiBot)
A2シリーズは、AgiBotのフルサイズヒューマノイド群です。
接客・案内用途をベースとしながら、軽作業まで対応可能な総合型ヒューマノイドとして設計されています。
LLMやマルチモーダルAIを組み込み、対話・認識・行動を統合している点が特徴です。
| 項目 | 内容 |
|---|---|
| タイプ | 二足歩行 |
| 身長 / 重量 | 約169cm / 約69kg |
| 自由度 | 40以上 |
| 稼働時間 | 約2時間 |
| 特徴 | 対話・案内・軽作業対応 |
| 主用途 | 展示会・ショールーム |
「人と接する現場」に加え、将来的には人手不足対応の軽作業用途まで見据えた構成と言えます。
A2 Max(AgiBot)
A2 Maxは、A2シリーズの中でも高負荷作業を想定した上位モデルです。産業グレードの多自由度ハンドも特徴として挙げられています。
このモデルは、より重量物を扱う産業寄りのヒューマノイドと見るべきです。AgiBotが「人型で何ができるか」を示す象徴的な製品でもあります。
| 項目 | 内容 |
|---|---|
| タイプ | 二足歩行 |
| 身長 / 重量 | 約175cm / 約85kg |
| 可搬重量 | 最大40kg |
| 稼働時間 | 約2時間 |
| 特徴 | 高トルク・多自由度ハンド |
| 主用途 | 重作業・産業用途 |
A2-W(AgiBot)
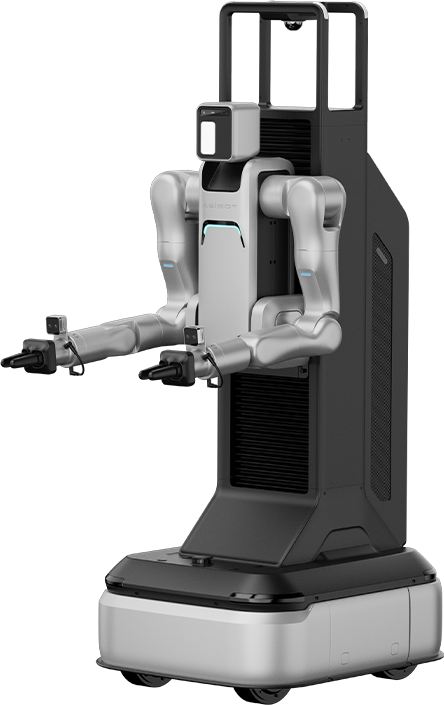
A2-Wは、AgiBotの中でも特に製造業・物流業の読者に近い製品です。二足歩行ではなく、車輪移動を採用したモバイル双腕ロボットです。掴む、置く、搬送する、挿入するといった作業を想定しています。
A2-Wは、AgiBotの中で最も「現場設備」に近い製品です。ヒューマノイドらしさよりも、柔軟生産ラインに導入しやすいモバイル両腕ロボットとして理解した方が適切です。ワークの供給・取り出し、端子挿入、物流搬送など、製造と物流の境界にある工程に適しています。
| 項目 | 内容 |
|---|---|
| タイプ | 車輪移動+双腕 |
| 可搬重量 | 約5kg/片腕 |
| 作業高さ | 約0〜2m |
| 稼働時間 | 約5時間 |
| 特徴 | LiDAR・力覚センサ搭載 |
| 主用途 | 搬送・投入・軽作業 |
X2シリーズ(AgiBot)
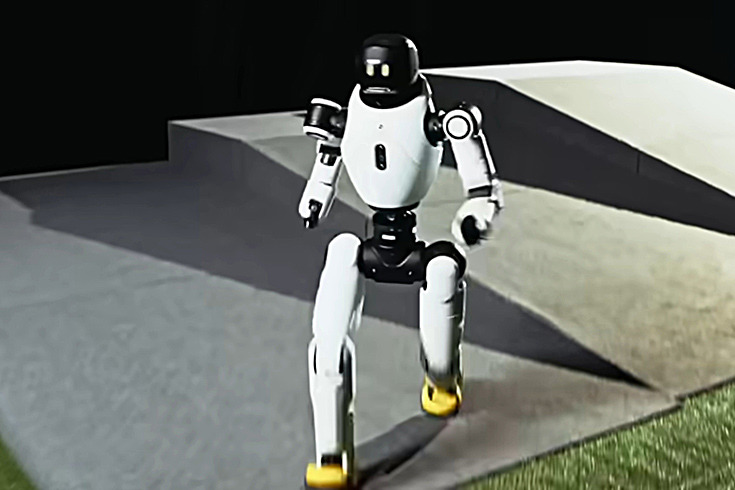
X2シリーズは、小型のヒューマノイドで、接客・イベント用途に特化したモデルです。
親和性の高いデザインと対話機能により、人とのインタラクションを重視しています。
また、老人ホーム等からの問い合わせも多く、会話や簡単な動作(薬のピックアップなど)が可能です。
| 項目 | 内容 |
|---|---|
| タイプ | 二足歩行 |
| 身長 / 重量 | 約130cm / 約35kg |
| 可搬重量 | 約1kg以下 |
| 稼働時間 | 約2時間 |
| 特徴 | 対話・ジェスチャー |
| 主用途 | 接客・イベント |
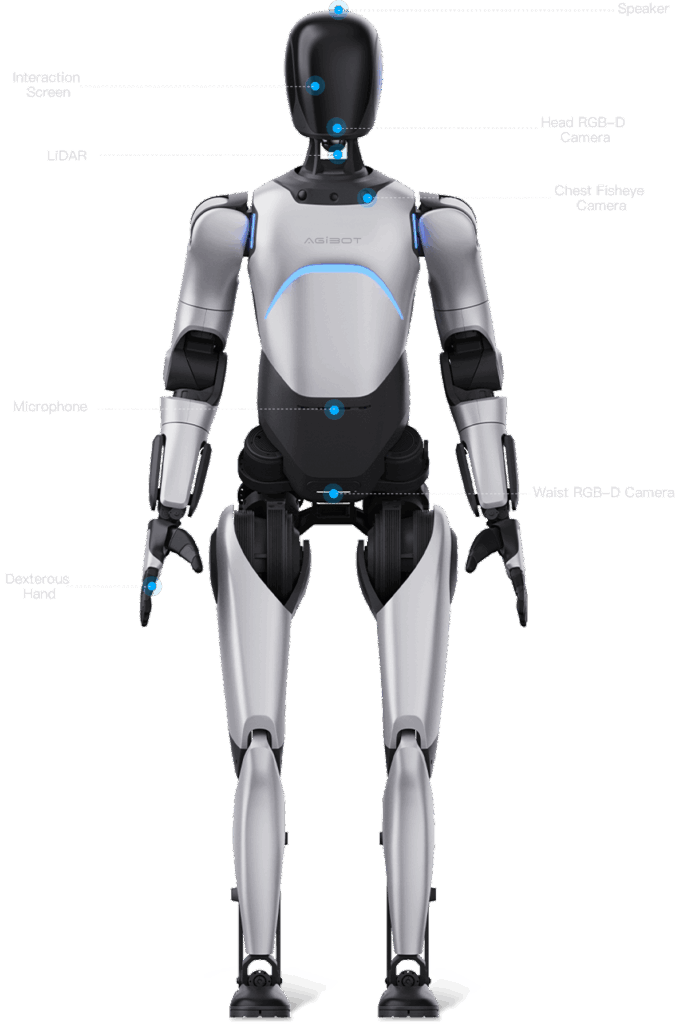
X2 Ultra(AgiBot)
X2 Ultraは、認識・判断・自律行動の能力を大幅に強化した上位モデルです。LiDARやRGB-Dカメラといった複数のセンサに加え、高性能なAI処理基盤(NVIDIA Orin NX)を搭載することで、周囲環境を三次元的に把握し、自律的に移動・行動できる点が特徴です。
| 項目 | 内容 |
|---|---|
| タイプ | 小型ヒューマノイド |
| 自由度 | 約30 |
| センサ | LiDAR / RGB-Dカメラ / 複数カメラ |
| AI処理 | NVIDIA Orin NX(高性能推論) |
| 特徴 | 環境認識・自律行動 |
| 主用途 | 研究・開発・高度接客 |
G1(AgiBot)
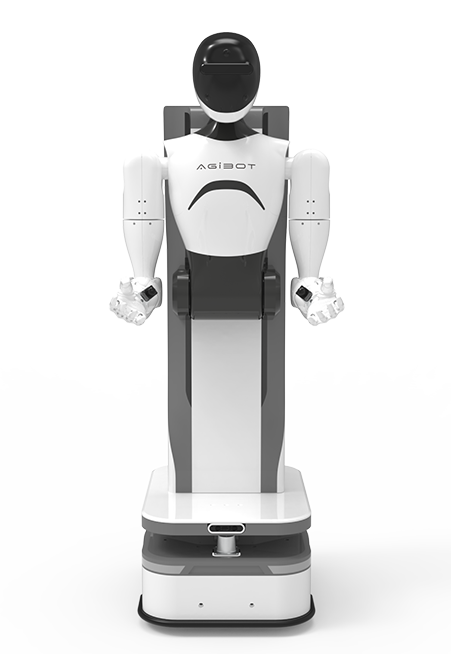
G1は、作業だけでなくデータ収集とAI学習を前提に設計されたモバイル双腕ロボットです。遠隔操作などで人の動作を取得し、そのデータを学習に活用することで、現場で「教えて覚える」ロボット運用を実現します。製造・物流分野における自律化の基盤となるモデルです。
| 項目 | 内容 |
|---|---|
| タイプ | モバイル双腕ロボット |
| 可搬重量 | 約3kg/片手 |
| 稼働時間 | 約4時間以上 |
| センサ | RGB-D + 魚眼カメラ |
| AI処理 | Jetson AGX Orin |
| 特徴 | データ収集・遠隔操作 |
| 主用途 | AI開発・産業 |
Agibotのグリッパー製品ラインナップ
Omnipicker(AgiBot)

OmniPickerは、軽量かつ高い汎用性を備えた適応型ロボットグリッパーです。最大の特徴は「1自由度」というシンプルな構造である点です。
また、約430gという軽量設計により、ヒューマノイドロボットや協働ロボット、モバイルマニピュレータなど幅広いプラットフォームに容易に統合可能で、研究用途から実運用まで柔軟に対応します。
OmniPickerが特に効果を発揮するのは、以下のような工程です。
- 多品種小ロットのピッキング工程
- バラ積みワークの取り出し
- 食品・日用品など形状ばらつきの大きい対象
- サービスロボット用途(人との共存環境)
一方で、以下の用途では従来方式の方が適している場合があります。
- 高速・高精度の繰り返し搬送
- 重量物の確実把持
- 厳密な位置決めが要求される工程
このように、「適材適所」で使い分けることが重要です。
| 項目 | 内容 |
|---|---|
| 重量 | 約0.43 kg |
| 把持力 | 約30 N(公称) |
| ストローク | 約120 mm |
| 閉動作時間 | 約0.7 秒 |
| 駆動方式 | 単一自由度(1DoF) |
| 動作電圧 | 12~30 V DC |
| 通信インターフェース | CAN / CAN-FD / RS-485 |
| 特徴 | 形状適応型フィンガーによる自己センタリング把持 |
| 対応ロボット | 協働ロボット、産業用アーム、ヒューマノイドなど |
導入検討時のポイント|SIer視点での注意点
OmniPickerは非常に扱いやすいグリッパーですが、導入時にはいくつか押さえるべきポイントがあります。
まず、把持力と対象重量の関係です。
公称把持力は約30Nであり、重量物の確実把持には適していません。特に加減速が大きい搬送では、ワークの滑りや脱落リスクを事前に評価する必要があります。
次に、対象物の表面状態です。
油分や粉体が付着している場合、摩擦係数が低下し、保持安定性に影響が出ます。必要に応じてパッド材質の選定や補助機構の検討が必要です。
また、ビジョンとの組み合わせも重要です。
OmniPicker単体では「掴み方」は解決できますが、「どこを掴むか」は別の問題です。3DビジョンやAI認識と組み合わせることで、初めてランダムピッキング全体が成立します。
グリッパー選定の考え方|“運用できるか”で判断する

グリッパーの選定は、「掴めるか」ではなく“安定して運用できるか”が判断基準になります。
現場で失敗する多くのケースは、性能ではなく“条件の見落とし”によるものです。
① 対象物の整理(まず最初に見るべきポイント)
対象ワークの性質によって、選定の方向性はほぼ決まります。
| 項目 | 確認内容 | 選定への影響 |
|---|---|---|
| 重量 | 何kgか、重心位置 | 把持力・安全率に直結 |
| 形状 | 定形 / 不定形 | 専用 or 汎用の判断 |
| 材質 | 滑りやすい・柔らかい | 真空 or 機械把持の選択 |
| ばらつき | サイズ・姿勢の変動 | アダプティブ性の必要性 |
② 工程条件の整理
実際のライン条件によって、適したグリッパーは変わります。
| 項目 | 確認内容 | 注意点 |
|---|---|---|
| タクト | 何秒で動くか | 開閉速度・応答性 |
| 加減速 | 急停止・高速移動 | ワーク脱落リスク |
| 搬送距離 | 長距離 or 短距離 | 保持安定性 |
| 設置環境 | 粉塵・油・温度 | 吸着・摩擦への影響 |
③ 変化への対応力
現場では必ず仕様変更が発生します。
| 観点 | 専用グリッパー | 汎用グリッパー(例:OmniPicker) |
|---|---|---|
| 初期性能 | 高い | 中程度 |
| 調整工数 | 大きい | 小さい |
| 品種変更対応 | 弱い | 強い |
| 長期コスト | 高くなりやすい | 抑えやすい |
AgiBotに関するよくある質問(Q&A)
AgiBotおよびOmniPickerを検討する際に、現場でよく挙がる疑問を整理しました。導入判断の参考としてご覧ください。
Q1. AgiBotはどのようなメーカーですか?
AgiBotは、中国・上海に本社を置くロボティクス企業で、ヒューマノイドロボットを中心に急成長しているメーカーです。
特徴は、ハードウェア単体ではなく、AI・認識・動作を一体で設計している点にあります。特にマニピュレーション(掴む動作)領域に積極的に投資している点が、他社との差別化要素です。
Q2. OmniPickerはどのような用途に向いていますか?
OmniPickerは、以下のようなばらつきの大きいピッキング工程に適しています。
- 多品種小ロットのワーク搬送
- ランダム配置された部品の取り出し
- 日用品・食品など形状が不定な対象
一方で、高精度な位置決めや重量物搬送には、従来の専用グリッパーの方が適しているケースもあります。
Q3. 1自由度で本当に安定して把持できますか?
はい。OmniPickerは、受動的適応機構を採用しており、対象物の形状に応じて指が自然に追従します。
そのため、複雑な制御を行わなくても、安定した把持状態に自動的に収束する設計となっています。
Q4. ビジョンシステムは必須ですか?
用途によります。
整列されたワークであれば不要な場合もありますが、ランダムピッキングでは3DビジョンやAI認識との組み合わせが前提になります。
OmniPickerは「どう掴むか」を解決するデバイスであり、
「どこを掴むか」は別途システム設計が必要です。
Q5. 協働ロボットとの接続は容易ですか?
OmniPickerはCAN / RS-485などの標準的なインターフェースに対応しており、多くの協働ロボットや産業用ロボットと接続可能です。
また軽量(約430g)なため、可搬重量への影響も小さく、既存設備への後付けも現実的です。
ハンドの選定でお困りの方や、実ワークを用いた機器テストをご希望の方は下記フォームよりお問い合わせください。
Q6. 導入時に注意すべきポイントは何ですか?
主に以下の3点です。
- 把持力とワーク重量のバランス(加減速時の脱落リスク)
- 表面状態(油・粉塵)による摩擦低下
- 工程全体での設計(ビジョン・動作計画含む)
特に「グリッパー単体で解決しようとしないこと」が重要です。
iCOM技研による導入サポート|グリッパー導入の「壁」を取り除く

協働ロボットの導入に不安がある方でも、iCOM技研による以下のサポート体制で安心です。
- 使用目的に合ったモデル選定のコンサルティング
- 導入前の実機デモ・テストで効果を可視化
- ロボット操作教育、安全指導まで含めた現場立ち上げ支援
- ロボットシステム全体の提案(ハンドツール選定)
弊社では協働ロボットを中心とした様々なメーカーを取り扱っております。また、最適なロボット選定からシステム開発・立ち上げまで一貫してご支援可能です。
パレタイジングに関するお問い合わせ・相談お待ちしております。
「自社にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。