協働ロボット用グリッパーについて、協働ロボットSIerの視点から詳しく解説します。
協働ロボットの普及が進む中で、「ロボットは導入したが、思うように活用しきれていない」という声を耳にすることは少なくありません。ではなぜこのような状態になるのでしょうか。
実際に現場を詳しく見ていくと、ロボット本体の性能不足ではなく、グリッパー(ロボットハンド)の選定ミスに行き着くケースが多く見られます。つまり、協働ロボット活用の成否は「ハンドで決まる」と言っても過言ではありません。
本記事では、協働ロボット用グリッパーについて基礎的な情報について解説していきます。選定の注意点や把持方式、メーカーと代表機種までを、背景や理由を含めて詳しく解説します。

Gripper EPG-40-050
通常価格(税別)
97,500円~
通常出荷日10日~
Gripper RG52-050
通常価格(税別)
お問い合わせください
通常出荷日10日~
目次[]
- 協働ロボットグリッパーとは何か
- 駆動源で分類する協働ロボットグリッパーの種類
- 空気圧グリッパーの特徴
- 電動グリッパーの特徴
- 電磁式グリッパーの特徴
- メーカー別協働ロボットグリッパー
- LEHRシリーズ(SMC)
- ZXPE5 Series (SMC)
- EGH(SCHUNK)
- Co-act EGP-C(SCHUNK)
- e-VEE(日東工器)
- Kenos® Vacuum Gripper – KVGL-S(Piab)
- Kenos® Vacuum Gripper – KSG(Piab)
- ECBPi(Schmalz)
- SFG(Schmalz)
- 2F-85 Adaptive Gripper(Robotiq)
- Hand-E(Robotiq)
- RGシリーズ Jodell Robotics(ジョデル・ロボティクス)
- EPGシリーズ Jodell Robotics(ジョデル・ロボティクス)
- Z-EFG シリーズ (HITBOT)
- 協働ロボットグリッパーを選定する際の注意点と流れ
- iCOM技研による導入サポート|グリッパー導入の「壁」を取り除く
協働ロボットグリッパーとは何か

協働ロボット用グリッパーは、産業用ロボットハンドとは設計思想が根本的に異なります。
従来の産業用ロボットでは、「高速・高把持力・高剛性」が最優先されてきました。一方、協働ロボットは人の近く、あるいは人と同じ作業空間で使われます。そのため、協働ロボットグリッパーにも以下のような特性が強く求められます。
- 人に接触した際のリスクが低い構造
- 把持力や速度を細かく制御できること
- 多品種・形状違いのワークに柔軟に対応できること
- 現場での段取り替えや設定変更が容易であること
この流れの中で、従来主流だった空気圧グリッパーに加え、電動グリッパー、電動真空グリッパー、ソフトグリッパーといった新しい選択肢が急速に広がっています。
駆動源で分類する協働ロボットグリッパーの種類
協働ロボットに使用されるグリッパーは、駆動源の違いによって大きく分類できます。一般的な協働ロボットグリッパーの駆動源は以下の3つに分類されます。
| 項目 | 空気圧グリッパ | 電動グリッパ | 電磁グリッパ |
|---|---|---|---|
| 駆動源 | 圧縮空気 | 電力(モーター) | 電力(電磁石) |
| 把持原理 | シリンダによる機械的把持 | モーター制御による把持 | 磁力による吸着 |
| 主な用途 | 一般搬送・重量物 | 多品種・精密作業 | 磁性体専用搬送 |
| 柔軟性 | △ | ◎ | △ |
| 協働ロボット適性 | ○ | ◎ | △ |
| 対象ワーク | 幅広い | 幅広い | 磁性体のみ |
それぞれは駆動原理が異なるため、性能特性・導入のしやすさ・運用コストが大きく変わります。ここではまず全体像を整理したうえで、各方式の特徴を詳しく見ていきます。
空気圧グリッパーと電動グリッパーの基本的な違い
空気圧グリッパーは、圧縮空気の力を利用して指を開閉させる方式です。一方、電動グリッパーはモーターを用いて電力で指を駆動します。
一見すると「駆動源が違うだけ」に見えますが、実際には以下のような点で運用思想が異なります。
- 空気圧グリッパー:シンプル・高速・高把持力を重視する現場向け
- 電動グリッパー:精密制御・柔軟性・省設備を重視する現場向け
この違いを理解することが、適切なグリッパー選定の第一歩となります。
空気圧グリッパーの特徴

空気圧グリッパーは、ロボットハンドの中でも最も歴史があり、広く普及している方式です。
まず、空気圧式グリッパーはコンプレッサーから供給される圧縮空気でシリンダーを駆動します。構造が比較的シンプルで、軽量かつ高速な動作が可能という、製造現場にとって扱いやすい特性があります。
特に、繰り返し動作が多い組立工程や搬送工程では、確実に掴み、速く動かすという要求が重視されるため、空気圧グリッパーの強みが発揮されます。
空気圧グリッパーのメリット
空気圧グリッパーには、現場で評価されやすい以下のような利点があります。
- 構成がシンプルで、コントローラなどの周辺機器が不要な場合が多く、導入しやすい
- 製品バリエーションが非常に豊富で、ワーク形状や把持力に応じた選択肢が多い
- 軽量な機種が多く、ロボットの可搬重量をワーク側に多く割り当てられる
- 防塵・防水性能(IP規格)を確保しやすく、耐環境性に優れる
- 把持力が大きく、重量ワークの搬送に適している
- 動作が速く、サイクルタイムを短縮しやすい
これらの点から、空気圧グリッパーは「堅牢で扱いやすい、標準的なグリッパー」として、多くの量産ラインで採用されています。
空気圧グリッパーのデメリット
ただし、空気圧方式は万能ではありません。例えば、エア源や配管が必須となるため設備が複雑になりやすく、エア漏れや配管劣化への点検も必要になります。
その結果、把持力や位置を数値で細かく制御したい工程では、運用面で限界が出ることがあります。
このため、多品種対応や段取り替え頻度が高い現場では、別方式の検討が現実的になります。
空気圧グリッパーが向いている用途
- 組立ライン
- 単一形状の部品搬送
- 重量ワークの把持
- 高速・繰り返し動作が求められる工程
電動グリッパーの特徴

電動グリッパーは、モーターを用いて指を駆動する方式で、近年急速に採用が進んでいます。特に協働ロボットとの相性が良く、多品種少量生産や柔軟な運用が求められる現場で、その価値が高く評価されています。
電動グリッパーの最大の特長は、「制御できる」という点にあります。
把持力や位置を数値として扱えるため、従来は人手に頼っていた繊細な作業の自動化が可能になります。
電動グリッパーのメリット
電動グリッパーの最大の特長は、「制御できること」です。
以下のようなメリットがあります。
- 把持位置・把持力・速度をプログラムで細かく設定できる
- サイズや向きの異なるワークを、1台のグリッパーで把持可能
- エア配管が不要で、省配線な設備構成が可能
- エアコンプレッサーが不要なため、AGVや走行ロボットとの相性が良い
- カーボンニュートラルへの貢献が期待できる
これらの特性により、電動グリッパーは多品種少量生産や協働ロボットらしい使い方に適した方式と言えます。
電動グリッパーのデメリット
一方で、電動グリッパーにも以下のような課題があります。
- 空気圧式と比べて初期導入コストが高くなりやすい
- 機種によっては把持力が空気圧式ほど大きくない
- 制御設定や通信設定に一定の知識が必要
そのため、単純な重量物搬送や高速量産ラインでは、オーバースペックになるケースもあります。
電動グリッパーが向いている用途
- 多品種少量生産ライン
- サイズ・形状が頻繁に変わるワーク
- 精密部品や繊細なワークの把持
- 研究開発や実証ライン
電磁式グリッパーの特徴
電磁式グリッパーは、電磁石の吸着力を利用してワークを保持する方式です。
この方式の特徴は、機械的な把持機構を持たない点にあります。そのため可動部が少なく、摩耗が起こりにくいという利点があります。電磁式グリッパーの主な特長は次のとおりです。
- 吸着・解放動作が非常に高速
- 可動部が少なく、故障リスクが低い
- シンプルな構造でメンテナンス性に優れる
一方で、非磁性体には使用できず、吸着力がワーク材質や形状に左右されるという制約があります。そのため、磁性体のみを扱う専用工程において、有効な選択肢となります。
メーカー別協働ロボットグリッパー
メーカー概要
SMCは空気圧・電動アクチュエータ分野で世界最大級のメーカーです。また、URCap対応や省配線・省エアを重視した製品展開が特徴です。
LEHRシリーズ(SMC)

LEHRシリーズの主な仕様・特長ポイント
- 2種類のバリエーションを用意
- 把持力:60〜140 N
- 電気配線1本で作動
- バッテリレスアブソリュートエンコーダー搭載
- マニュアル式ツールチェンジャによる容易な交換
- プラグインソフト対応(URCap)
対応ロボットメーカー
UNIVERSAL ROBOTS、FANUC、TECHMAN ROBOTの協働ロボットに対応
| 項目 | 内容 |
|---|---|
| 型式 | LEHR5060 ~ LEHR140 |
| 開閉ストローク | 50 mm |
| 把持力 | 60 ~ 140 N |
| 駆動源 | 電動(アクチュエーター) |
| 本体重量 | 約 1 kg |
| 協働ロボット対応 | 対応 |
ZXPE5 Series (SMC)

ZXPE5 Seriesの特徴
真空ポンプを内蔵した協働ロボット用電動真空グリッパです。エア源を必要とせず、電気配線コネクタを接続するだけで動作可能なため、エア設備のない現場や移設・後付け用途に適しています。
- 特長① エア源不要の電動真空グリッパ
真空ポンプ内蔵構造により、圧縮エア設備が不要。電源接続のみで使用可能。 - 特長② 周辺機器を一体化したユニット設計
真空ポンプ・大気開放弁・圧力モニタ・パッドを一体化し、システム構成を簡素化。 - 特長③ 省エネ・軽量設計
消費電流最大64%削減(SMC比)を実現。本体重量は約556gと軽量で、協働ロボットの可搬重量を有効に活用可能。
対応ロボットメーカー
UNIVERSAL ROBOTS、FANUC、TECHMAN ROBOT、安川電機の協働ロボットに対応
| シリーズ | パッド形状 | パッド径 | 最大吸込流量 | 最大可搬質量 |
|---|---|---|---|---|
| ZXPE5 | 平形 平形リブ付 べロウ形 薄形 多段べロウ形 2.5段べロウ形 5.5段べロウ形 フィルム包装ワーク用平形 | φ8~φ32 | 4.5[L/min(ANR)] | 5kg |
EGH(SCHUNK)
メーカー概要
SCHUNKは、把持技術・クランプ技術で世界的な評価を受けるドイツメーカーです。また、高剛性・高耐久を維持しつつ安全性を考慮した電動グリッパを展開しています。

EGH(SCHUNK)の特徴
EGHは、産業用途レベルの信頼性を適用した電動パラレルグリッパです。高精度な把持力制御と堅牢な構造を備えています。それにより、単純な搬送だけでなく、組立や位置決め精度が求められる工程にも対応可能です。
そのため、協働ロボットとの組み合わせを前提としつつ、「産業品質を落としたくない現場」に適したモデルです。
対応ロボットメーカー
Universal Robots、FANUC(CRXシリーズ)、オムロン/TECHMAN ROBOT など、主要な協働ロボットメーカーの機種に対応しています。構成によっては KUKA や ABB などへの適用も可能です。
| 項目 | EGH 80-IOL-N-UREK | EGH 80-IOL-N-TMEK | EGH 80-IOL-N-FCRXEK |
|---|---|---|---|
| 片側ストローク [mm] | 40 | 40 | 40 |
| 把持力(最小 / 最大)[N] | 50 / 100 | 50 / 100 | 50 / 100 |
| 推奨ワーク重量 [kg] | 0.5 | 0.5 | 0.5 |
| 最大許容フィンガー長 [mm] | 70 | 70 | 70 |
| 最大許容重量/フィンガー [kg] | 0.2 | 0.2 | 0.2 |
| 本体重量 [kg] | 0.95 | 1.06 | 0.95 |
Co-act EGP-C(SCHUNK)

Co-act EGP-C(SCHUNK)の特徴
協働ロボット用途に特化して設計された小型・軽量の電動グリッパです。人との共存環境を前提とした安全設計を採用しています。そのため、ピック&プレースや軽作業工程など、協働作業を想定した用途に適しています。
対応ロボットメーカー
Universal Robots、FANUC(CRXシリーズ)、オムロン/TECHMAN ROBOT などの協働ロボットと組み合わせて使用可能です。
| 型式 | ストローク [mm] | 最大把持力 [N] | 推奨ワーク重量 [kg] | 重量 [kg] |
|---|---|---|---|---|
| EGP-C 25-N-N-URID | 3 | 40 | 0.2 | 0.36 |
| EGP-C 25-N-N-UREK | 3 | 40 | 0.2 | 0.63 |
| EGP-C 40-N-N-URID | 6 | 140 | 0.7 | 0.59 |
| EGP-C 40-N-N-UREK | 6 | 140 | 0.7 | 0.86 |
| EGP-C 50-N-N-UREK | 8 | 215 | 1.05 | 1.22 |
| EGP-C 64-N-N-URID | 10 | 230 | 1.15 | 1.11 |
e-VEE(日東工器)
メーカー概要
日東工器は、迅速流体継手・電動工具・流体制御機器などで高い実績を持つ日本メーカーです。また、エアレス・省配線を重視した電動吸着ハンドを展開しています。

日東工器e-VEE の主な特長
ロボット本体からの電源で駆動するため省配線な運用が可能です。また、吸着時のみ稼働する真空パッドにより静かで省電力な運用を実現します。
- 電動式真空機構を採用し、圧縮エア源が不要
- 真空発生・開放制御・基本監視機能をユニット一体化
- 配管・配線点数を抑えたシンプルなシステム構成
対応ロボットメーカー
UNIVERSAL ROBOTS、FANUC(CRXシリーズ)、オムロン/TECHMAN ROBOT など
| 項目 | 内容 |
|---|---|
| 型式 | EVE-500 |
| 最高真空圧 | −66 kPa(−500 mmHg) |
| 吐出空気量 | 7.5 L/min |
| 定格電圧 | DC 24 V |
| 消費電力 | 14.4 W |
| 本体質量 | 約0.9 kg(本体のみ) |
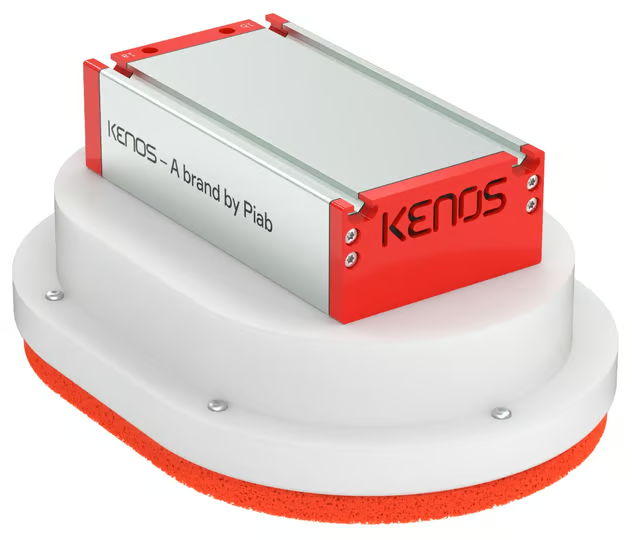
Kenos® Vacuum Gripper – KVGL-S(Piab)
メーカー概要
Piab(ピアブ)は、スウェーデンに本社を置く 真空搬送・吸着技術の専門メーカー です。吸着パッド、真空グリッパーを中心に展開しています。また、物流・食品・包装・製造業向けの自動化ソリューションを世界中に提供してきました。箱物・袋物・不定形ワークといった、人手作業が多い工程の自動化に強みを持っています。

製品概要
Kenos® Vacuum Gripper KVGL-S は、Piab の協働ロボット向け真空グリッパーです。また、本製品は段ボール箱や一斗缶など、表面が不定形なワークの吸着 を得意とするモデルです。
物流・製造現場における箱搬送や容器ハンドリングを想定しています。そのため、ワーク表面の凹凸やばらつきに対応できる構造を採用しています。
主な特長
- 段ボール箱・一斗缶など不定形ワークに対応
- 表面の凹凸や傾きに追従する高い吸着適応力
- 箱サイズや材質差による吸着不良を低減
対応ロボットメーカー
UNIVERSAL ROBOTS、FANUC(CRXシリーズ)、オムロン/TECHMAN ROBOT
※構成により ABB、KUKA などにも対応可能
Kenos® Vacuum Gripper – KSG(Piab)
製品概要
Kenos® Vacuum Gripper KSG は、Piab が培ってきた真空技術をベースに、
袋物ワークの吸着に特化 して設計された協働ロボット向けグリッパーです。
コメ袋などのクラフト紙素材から、ビニール・樹脂袋まで、柔らかく変形しやすいワークを安定してハンドリングできます。
主な特長
- 袋物専用設計による高い吸着安定性
- クラフト紙袋・ビニール袋など幅広い素材に対応
- ワーク形状の変化に追従する柔軟な吸着構造
対応ロボットメーカー
UNIVERSAL ROBOTS、FANUC(CRXシリーズ)、オムロン/TECHMAN ROBOT
※構成により ABB、KUKA などにも対応可能
ECBPi(Schmalz)
メーカー概要
Schmalz(シュマルツ)は、ドイツに本社を置く 真空搬送・吸着技術の世界的専門メーカー です。自動化・物流・包装・食品分野を中心に、真空発生器、吸着パッド、真空グリッパを幅広く展開しています。

製品概要
ECBPi は、協働ロボットをはじめとした自動化設備向けに設計された電動真空グリッパ です。特に物流分野での使用を想定し、段ボール箱やトレイ、平面ワークの搬送に強みを持ちます。
エア源を必要としないため、移設やレイアウト変更が多い物流現場でも導入しやすい構成です。
主な特長
- 電動真空方式を採用し、圧縮エア源が不要
- 段ボール箱・トレイなど物流用途に最適化された設計
- 配管不要による省配線・省スペース構成
主な用途
物流倉庫、Eコマース、ケース搬送、箱詰め工程
SFG(Schmalz)

製品概要
SFG は、食品業界向けに設計された協働ロボット対応の真空グリッパ です。
また、衛生性を重視した構造を採用し、生鮮食品から包装済み食品まで幅広く対応します。そのため、食品製造・包装ラインにおいて、人手作業が多い工程の自動化を目的とした導入に適しています。
主な特長
- 食品向け設計(衛生性・洗浄性を考慮)
- 食品表面にやさしいソフト吸着構造
- 生鮮食品・包装食品の安定したハンドリング
- 食品工場に求められる清掃性・メンテナンス性を重視
主な用途
食品製造、食品包装、トレー搬送、ピッキング工程
2F-85 Adaptive Gripper(Robotiq)

メーカー概要
Robotiq(ロボティック)は、カナダに本社を置く 協働ロボット向けエンドエフェクタの専業メーカー です。特に Universal Robots との高い親和性で知られ、
電動グリッパ・力覚センサ・ソフトウェアを含めたエコシステムを構築しています。
製品概要
2F-85 Adaptive Gripper は、Robotiq を代表するアダプティブ(適応型)電動グリッパ です。ワーク形状に応じて指が自動的に追従し、多品種・形状ばらつきのあるワークでも安定した把持が可能です。
治具レス化や段取り替え工数の削減を目的とした現場で、協働ロボットと組み合わせて多く導入されています。
主な特長
- ワーク形状に追従するアダプティブ把持機構
- 丸物・角物・不定形物まで対応する高い汎用性
- 段取り替えやティーチング工数を削減
Hand-E(Robotiq)

製品概要
Hand-E は、Robotiq が展開する高精度・高耐環境性を備えた電動グリッパ です。
また、IP67 対応により、粉塵・水滴が発生する環境でも安定稼働します。
位置決め精度や再現性が求められる工程や、やや過酷な作業環境での使用を想定したモデルです。
主な特長
- 高精度な把持制御による安定した位置決め
- IP67 対応で粉塵・水分の影響を受けにくい
- 剛性の高い構造による安定した把持力
| 項目 | HAND-E | HAND-E C10 | 2F-85 Adaptive | 2F-140 Adaptive | 3-FINGER |
|---|---|---|---|---|---|
| 可搬重量(平行把持) | 7 kg | 10 kg | 5 kg | 2.5 kg | 2.5 kg |
| フィンガー全開幅 | Ø 50 mm | Ø 40 mm | 85 mm | 140 mm | 155 mm |
| 把持力 | 20~185 N | 175 N | 20~235 N | 10~125 N | 30~70 N |
| 本体重量 | 1.0 kg | 1.5 kg | 0.9 kg | 1.0 kg | 2.3 kg |
| IP 等級 | IP67 | IP40 | ― | ― | ― |
RGシリーズ Jodell Robotics(ジョデル・ロボティクス)
メーカー概要
Jodell Roboticsは、中国を拠点とする協働ロボット向け電動グリッパーの専門メーカーです。高出力・高耐久を特長とし、産業用途から研究・教育用途まで幅広い電動グリッパーを展開しています。

製品概要
RGシリーズ は、Jodell Robotics の中でも産業用途を主眼に設計された高出力電動グリッパー です。協働ロボットとの組み合わせを前提としつつ、把持力・耐環境性・安全性を重視した構成となっています。
主な特長
- UR+ 認証モデルあり(URCap対応)
- 最大 ±0.02 mm の高い繰り返し精度
- IP54~IP65 の防塵・防水仕様
- 電源オフ時でもワークを保持する 自動保持機構(パワーロスロック)
| 製品名 | 把持力 | ストローク | 重量 | 保護等級 | 特長 |
|---|---|---|---|---|---|
| RG52-050 | ~50 N | 0~52 mm | 約 750 g | IP54 | UR+対応、小型ロボット向け |
| RG75-300 | 40~300 N | 0~75 mm | 約 1,500 g | IP65 | 大把持力、電源断時自動ロック搭載 |
EPGシリーズ Jodell Robotics(ジョデル・ロボティクス)

製品概要
EPGシリーズ は、RGシリーズに比べて
軽量・コンパクト・コスト重視 の設計を採用した電動グリッパーです。
卓上ロボットや小型協働ロボットとの組み合わせに適しています。
主な特長
- 軽量・省スペース設計
- 比較的低コストで導入可能
- 教育・研究用途から簡易的な産業用途まで対応
- 小型ワークの搬送・把持に最適
| 製品名 | 把持力 | ストローク | 重量 | 特長 |
|---|---|---|---|---|
| EPG26-015 | 3~15 N | 0~26 mm | 約 250 g | 教育・研究用途に最適 |
| EPG40-100 | 40~100 N | 0~40 mm | 約 370 g | 高把持力を活かした産業用途向け |
| EPG50-060 | 10~60 N | 0~50 mm | 約 570 g | 卓上ロボット・小物搬送向け |
Z-EFG シリーズ (HITBOT)
メーカー概要
HITBOTは、中国を拠点とする 協働ロボット向け電動グリッパーの専門メーカー です。特に 軽量・高精度・コストパフォーマンス を強みとし、中国国内のみならず、日本・欧州を含む協働ロボット市場で採用が拡大しています。
また、URをはじめとした協働ロボットとの親和性が高く、研究開発用途から実運用まで幅広く使える電動グリッパー をラインアップしています。

製品概要
Z-EFG シリーズ は、HITBOT を代表する高精度・軽量設計の電動パラレルグリッパー です。把持力制御と繰り返し精度を重視しており、電子部品や小型ワークの把持・組立工程に適しています。
主な特長
- 軽量・コンパクト設計で小型協働ロボットに最適
- 高い繰り返し精度による安定した把持
- 把持力・ストロークのパラメータ設定が可能
- 教育・研究用途から軽作業工程まで対応
- コストパフォーマンスに優れた価格帯
| 製品名 | 把持力(シングル) | ストローク | 重量 | 特長 |
|---|---|---|---|---|
| Z-EFG-20 | ~20 N | 0~20 mm | 約 350 g | 小型部品・研究用途向け |
| Z-EFG-30 | ~30 N | 0~30 mm | 約 450 g | 卓上ロボット向け |
| Z-EFG-40 | ~40 N | 0~40 mm | 約 650 g | 小型産業用途向け |
協働ロボットグリッパーを選定する際の注意点と流れ

どのようなワークを、どのような状態で、どの程度の頻度で扱うのか。この整理が不十分なまま機種を選定すると、後工程で必ず問題が発生します。
協働ロボット用グリッパー選定では、次の流れで検討することが重要です。
まずはワークを把持・吸着できるかを確認する
最初に確認すべき点は、対象となるワークを、安定して把持・吸着できるかどうかです。確認すべき主なポイントは以下のとおりです。
- ワークの重量・サイズ
- 形状(箱形、円筒形、不定形など)
- 材質(金属、樹脂、紙、食品など)
- 表面状態(平滑、凹凸、通気性の有無)
例えば、平坦に見えるワークでも凹凸や穴があると、真空吸着が不安定になることがあります。また、柔らかい素材のワークを剛性の高いグリッパーで掴むと、変形や破損を招く可能性があります。
重要なのは、「掴めるかどうか」ではなく「安定して掴み続けられるか」という視点です。
把持・吸着後のワーク状態に問題がないか
次に確認すべきなのが、把持・吸着後のワーク状態です。グリッパーで掴めたとしても、製品品質に影響が出てしまっては自動化の意味がありません。
よくある問題として、以下のようなケースがあります。
- 把持跡が製品表面に残る
- 吸着痕が意匠面に残る
- 把持時の圧力で変形する
- 応力が残り、後工程で不具合が出る
特に、医薬品・化粧品などの分野では、わずかな跡や変形が不良品につながることもあります。
ロボットとの接続性・システムとの親和性
協働ロボット用グリッパーでは、ロボット本体との接続性も重要な選定ポイントになります。確認しておきたい主な点は以下です。
- 配線・配管が複雑にならないか
- ロボットメーカー純正ソフト(URCapなど)に対応しているか
- 把持状態やエラー情報をフィードバックできるか
運用していく上でのコストを考慮する
グリッパー選定では、初期コストだけでなく、運用コストまで含めて考える必要があります。特に注意すべき点は以下です。
- エア・電気消費量が多くないか
- 消耗部品の交換頻度は高くないか
- 専用部品や交換部品の価格・入手性
これらは短期間では見えにくいものの、長期運用では確実にコスト差として表れます。
メンテナンス性が自動化の成否を左右する
最後に重要なのが、メンテナンス性です。メンテナンス性の低いグリッパーは、結果として自動化のランニングコストを押し上げます。そのため、以下のような点を確認しておくことが重要です。
- 清掃や点検が容易に行える構造か
- 消耗部品の交換が簡単か
- 故障時に迅速な対応が可能か
- 長期的に調達可能なグリッパーか
協働ロボットの価値は、止まらずに安定稼働し続けることにあります。
そのため、日常的な保守を前提とした設計かどうかも、重要な選定基準となります。
iCOM技研による導入サポート|グリッパー導入の「壁」を取り除く
協働ロボットの導入に不安がある方でも、iCOM技研による以下のサポート体制で安心です。
- 使用目的に合ったモデル選定のコンサルティング
- 導入前の実機デモ・テストで効果を可視化
- ロボット操作教育、安全指導まで含めた現場立ち上げ支援
- ロボットシステム全体の提案(ハンドツール選定)
弊社では協働ロボットを中心とした様々なメーカーを取り扱っております。また、最適なロボット選定からシステム開発・立ち上げまで一貫してご支援可能です。
パレタイジングに関するお問い合わせ・相談お待ちしております。
「自社にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。