近年、多くの生産現場でAMR(自律搬送ロボット)の導入が進んでいます。
AMRは、単なる搬送機器から「設備とつながる存在」へと役割が変わりつつあります。コンベアやロボット、自動機と連携する運用では、わずかな位置ズレがそのままトラブルやタクト低下につながるためです。
こうした背景の中で、注目されているのが停止精度です。
本記事では、このDoup1000を軸に、停止精度が現場に与える影響と、その技術的な意味合いを整理していきます。
目次[]
Doup Roboticsとは

Doup Roboticsは、2025年に設立された日本発のロボティクスメーカーです。製造業・物流業向けの自律搬送ロボット(AMR)の開発を主軸としています。
同社の特徴は、単なる車体開発にとどまらず、自己位置推定・制御ソフト・群制御までを一体で設計している点にあります。
こうした技術基盤のもとで開発されたのが、重可搬AMR「Doup1000」です。
本機は、可搬重量1,000kg・最高速度2.0m/sという基本性能に加え、「停止精度±3mm」 を掲げています。
一般的にこのクラスのAMRでは、マーカーや磁気テープ、専用ドッキング機構などの補助手段を用いて精度を高めるケースが主流です。
一方でDoup1000は、Laser SLAMのみでこの精度を実現しています。
Doup1000の特徴と主要スペック

- 圧倒的な走行性能
最高速度2.0m/sに加え、Laser SLAMのみで停止精度±3mmという業界トップクラスの走行性能を実現。精密な位置決めが求められる製造工程にも、確実に対応可能です。- 重可搬&コンパクト設計
1,200 × 810 × 255 mmの低床・コンパクトな筐体でありながら、最大1,000kgの可搬重量を実現。パレット搬送や重量物の移動など、幅広い用途にご活用いただけます。- 高い安全性
国際安全規格ISO 13849-1におけるPLd(パフォーマンスレベルd)に適合したセーフティセンサおよびコントローラを標準装備。人と共存する環境下でも安心して導入いただけます。- 専門知識不要の操作UI
自社開発のフリート管理システム「DoupFleet」により、直感的な操作性を追求。PLC操作やコーディング等の専門スキルがない現場担当者でも、簡単にルート設定や運行管理を行うことが可能です。- 国産&自社開発
メカ設計からソフトウェアの開発まで、すべてを国内自社拠点で行っています。そのため、海外製品では対応が難しいカスタマイズやシステム連携にも柔軟かつ迅速に対応可能です。引用元:【Doup Robotics】次世代自律搬送ロボット「Doup1000」を発表 | 株式会社Doup Roboticsのプレスリリース
主要スペック
| 最高速度 | 2.0m/s |
|---|---|
| 停止精度 | ±3mm以内(Laser SLAM使用時) |
| 可搬重量 | 1000kg |
| 外形寸法 | 1,200 × 810 × 255 mm |
| セーフティ | PLd適合セーフティセンサ・コントローラ標準装備 |
- 設備側の位置決め機構を簡素化できる
- レイアウト変更の自由度が高まる
- 施工・保守コストを抑えられる
といった面で、従来のAMRとは異なる価値を持つ可能性があります。
停止精度の比較:AGV・AMR・Doup1000
一般的に、磁気テープ等で誘導するAGVは高い停止精度を持っていました。 対して従来のAMRは、環境変化に弱く、精度のバラつきが大きな課題でした。
| 機種・種類 | 誘導方式 | 停止精度の目安 | 特徴と課題 |
|---|---|---|---|
| 一般的なAGV | 磁気テープ等 | ±10mm〜30mm | 精度は高いが、軌道変更の工事が必要 |
| 一般的なAMR | Laser SLAM | ±50mm〜100mm | 導入は容易だが、設備連携には精度不足 |
| Doup1000 | Laser SLAM | ±3mm | 柔軟な経路設定と高精度停止を両立 |
停止精度とは何か?なぜここまで重要視されるのか
AMRにおける停止精度とは、目標位置に対してどれだけ誤差なく停止できるかを示す指標です。
一般的には±10〜30mm程度がひとつの目安とされています。多くの搬送用途ではこの範囲でも運用上は問題ありません。
しかし、設備連携を前提とした工程では、この数センチのズレが無視できない問題になります。
そのため、「設備と接続するための精度」が、AMR選定の重要な判断基準になりつつあります。
コンベア受け渡し工程における影響

コンベアとの受け渡しでは、停止位置のわずかなズレがそのまま搬送トラブルにつながります。
ワークの受け渡し位置がずれることで、詰まりや蛇行、場合によっては落下が発生します。
特に段ボールや袋物のように姿勢が安定しない対象では、この影響が顕著に現れます。結果としてライン停止や手直し作業が発生し、運用効率の低下を招きます。
ロボット連携におけるタクトへの影響
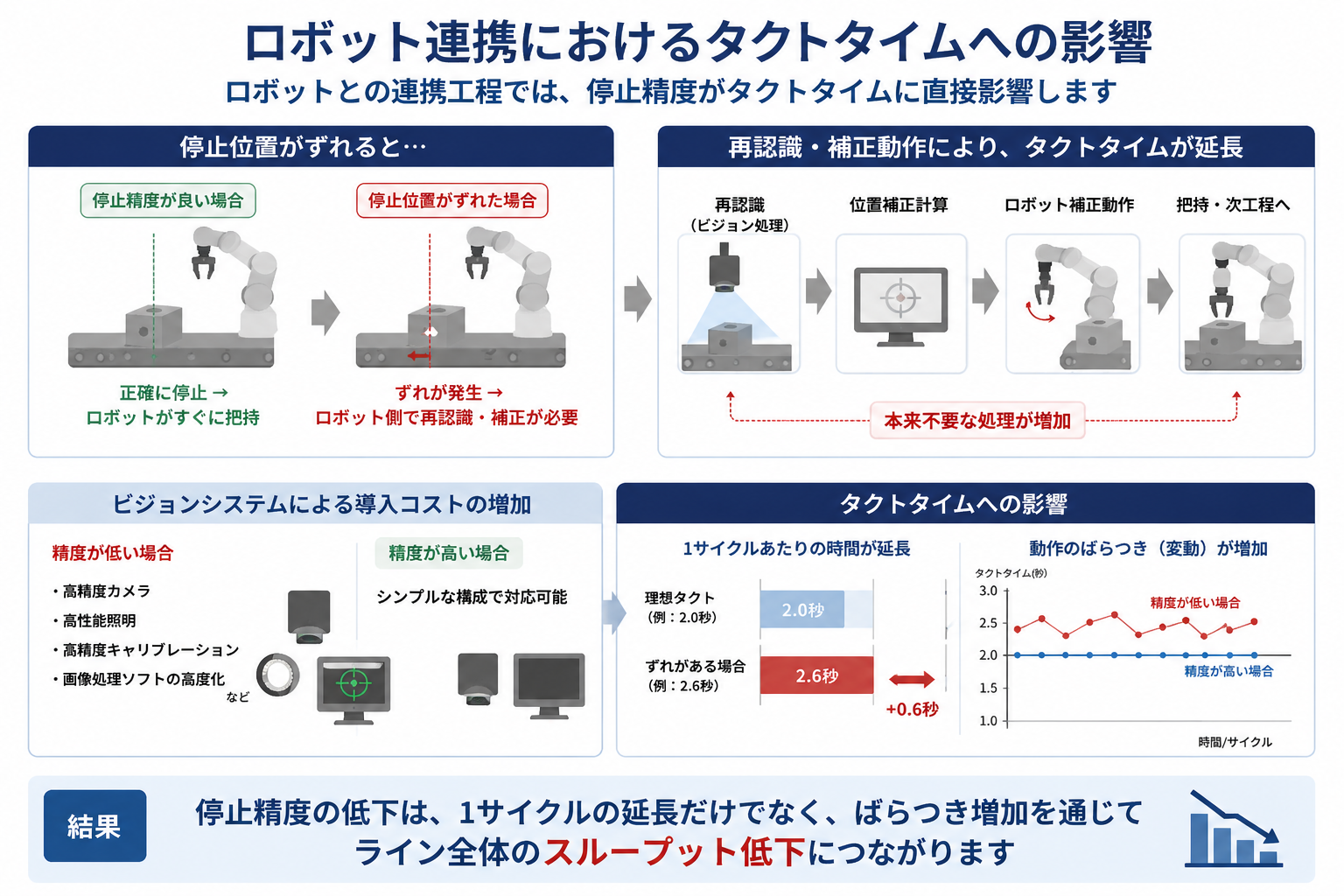
ロボットとの連携工程では、停止精度はタクトタイムに直接影響します。
停止位置がずれると、ロボット側で再認識や補正動作が必要となります。それにより、ビジョンシステムによる導入コストの増加や、本来不要な処理が増えます。
その結果、1サイクルあたりの時間が延びるだけではありません。動作のばらつきも増加し、ライン全体のスループット低下につながります。
自動機投入工程におけるエラーリスク

自動機への投入工程では、停止精度はシステム成立の前提条件になります。
位置ズレが許容範囲を超えた場合、設備は異常と判断しエラー停止するケースも少なくありません。特に治具やガイドを最小限に設計しているラインでは、この影響はより顕著です。
一度停止が発生すると復旧対応に時間を要し、生産ロスの拡大につながります。
従来AMRはなぜ高精度停止が難しいのか

ここまで見てきた通り、設備連携を前提とした工程では、±10mmでは不十分であり、±3〜5mm級の精度が求められる場面が増えています。
しかし、多くのAMRはこの領域において一定の制約を抱えています。
その理由は、自己位置推定の仕組みにあります。一般的なAMRはLiDARを用いたSLAMによって現在位置を認識しています。この方式は環境変化や床状態の影響を受けやすく、ミリ単位での絶対精度を安定して維持することが難しいという特性があります。
そのため実際の現場では、精度を補うためにさまざまな工夫が加えられています。床面マーカーや磁気テープによる補正、機械的なドッキング機構、さらにはビジョンによる位置補正などです。
これらの手段によって高精度化は可能になりますが、その一方で、
- 設備コストの増加
- レイアウト変更の制約
- 保守・メンテナンスの負担増加
といった新たな課題も発生します。
つまり従来のAMRは、「精度を上げるほどシステムが複雑になる」。という構造を持っていると言えます。
Q&A:Doup1000とAMRの停止精度に関するよくある質問
Q1. なぜ±3mmの停止精度が重要なのですか?
設備と直接連携する場合、数センチのズレでも不具合につながるためです。
コンベア受け渡しやロボット把持では、位置ズレがそのまま詰まり・再補正・エラー停止の原因になります。結果としてタクト悪化やライン停止を招くため、ミリ単位の精度が求められます。
Q2. 従来のAMRではなぜ高精度が難しいのですか?
多くのAMRはLiDARベースのSLAMで自己位置推定を行っており、環境変化や床状態の影響を受けやすいためです。
そのため実運用では、マーカーやドッキング機構などで精度を補うケースが一般的でした。
Q3. Doup1000は何が違うのですか?
Laser SLAMのみで±3mmの停止精度を実現している点です。
外部マーカーや専用機構に依存せず、高精度とレイアウト自由度を両立できるため、設備設計そのものをシンプルにできる可能性があります。
Q4. 高精度になると現場にはどんなメリットがありますか?
主に以下のような効果が期待できます。
・設備側の位置決め機構を簡素化できる
・レイアウト変更が容易になる
・保守・メンテナンス負担が軽減される
結果として、初期コストと運用コストの両方を抑えやすくなります。
Q5. すべての現場で±3mmの精度は必要ですか?
必ずしも必要ではありません。
単純な搬送用途であれば±10〜30mm程度でも問題ないケースが多くあります。
一方で、設備連携や自動機投入を前提とする場合は、±3〜5mmレベルの精度が実質的に必要条件になる場面が増えています。用途に応じた見極めが重要です。
iCOM技研による導入サポート|AMR導入の「壁」を取り除く

協働ロボットの導入に不安がある方でも、iCOM技研による以下のサポート体制で安心です。
- 使用目的に合ったモデル選定のコンサルティング
- 導入前の実機デモ・テストで効果を可視化
- ロボット操作教育、安全指導まで含めた現場立ち上げ支援
- ロボットシステム全体の提案(ハンドツール選定)
弊社では協働ロボットを中心とした様々なメーカーを取り扱っております。また、最適なロボット選定からシステム開発・立ち上げまで一貫してご支援可能です。
パレタイジングに関するお問い合わせ・相談お待ちしております。
「自社にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。