リニア中央新幹線において、設備保全の在り方そのものを変える可能性を秘めたロボットが登場しました。
JR東海・スズキ・パナソニック アドバンストテクノロジー(PAD)の3社が共同開発した「超電導リニア設備検査ロボット「Minervα(ミネルヴァ)」です。
本記事では、この設備検査ロボットMinervαが担う役割と、その技術的なポイント、そしてインフラ点検におけるロボット導入の本質的な意義について解説します。
目次[]
なぜ今、リニア設備の点検をロボット化する必要があるのか?
山梨リニア実験線には、
- 分岐装置
- 乗降装置
- トンネル内設備
- 下部に設置された各種機器
といった、特殊かつ点在する機械設備が多数存在します。
従来、これらの点検は作業員が現地まで移動し、
- 長距離のアクセス
- 狭隘空間での作業
- 身体に負荷のかかる姿勢
- 多項目の目視確認
といった条件下で実施してきました。
リニア中央新幹線の開業後は、
これと同様の点検作業を沿線全体にわたり広域で実施する必要があり、
① 移動時間の増大
② 作業負担の増加
③ 保全人材の不足
といった課題が顕在化することが想定されています。
つまり、
点検という「業務プロセスそのもの」の省力化が求められているのです。
これは、まさに製造業においてiCOM技研が取り組んでいる
パレタイジングや溶接の自動化と同様、
“作業の自動化”ではなく、“業務の自動化”
という考え方に基づくアプローチだといえます。
Minervαとは?
簡単に言うと、自律移動機構とロボットアームを組み合わせた
モバイルマニピュレーション型点検ロボットです。

Minervαの主な構成と技術的特徴
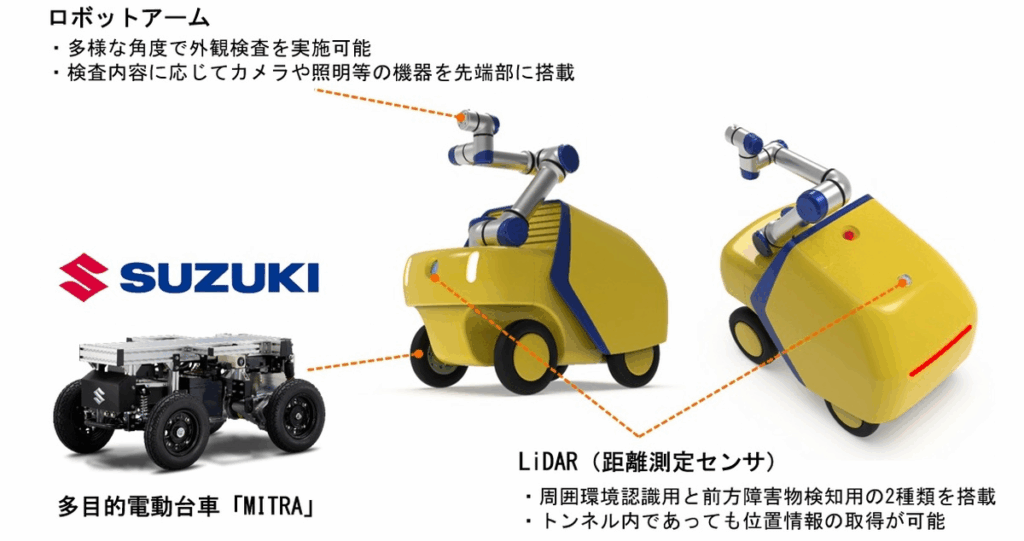
不整地走行に対応した移動機構
足回りには、スズキが開発中の
多目的電動台車「MITRA」を採用。
電動車いすの開発で培われた走破性能をベースに、
- 段差
- 砂利道
- 不整地
といった鉄道設備特有の環境でも走行が可能です。
これは、自律移動ロボットにおいて最大のボトルネックである
「現場環境適応性」を解決する“ロボットの足”として機能します。
LiDARによるトンネル内自己位置推定
GPSが利用できないトンネル環境下でも、
周囲環境認識用、前方障害物検知用の2種類のLiDARを用いています。
これにより、自己位置推定(SLAM)を実現。
設備点検位置までの自律走行を可能としています。
ロボットアームによる外観検査の自動化
検査動作はあらかじめティーチングにより記録され、以下の内容をを自動で実行します。これにより、
従来人手で行っていた外観検査(目視確認)を
ロボットによる定量的な検査へと置き換えることが可能になります。
- 点検対象位置への到達
- アーム動作の再現
- カメラ・照明による撮影
自律帰還・自動充電機能
バッテリー残量の低下時には、
①自律的に充電ステーションへ移動
②ライントレースモードに切替
③高精度な位置合わせ
④非接触での自動充電
を行い、連続稼働を実現します。
Minervαがもたらすインフラ保全の未来
設備検査ロボットを沿線各地に分散配置することで、
- 作業者の移動時間削減
- 点検作業負担の軽減
- 作業安全性の向上
- 保全品質の均一化
が期待されます。
特に重要なのは、
点検作業を「人が現地へ行く業務」から
「ロボットが巡回するサービス」へ変換できる
という点です。
これは、インフラ保全における
RaaS(Robotics as a Service)的な運用モデルへの転換を意味します。
Minervαの今後の展開
2026年2月より、山梨リニア実験線にて、現地検証が開始されています。
将来的には、リニア中央新幹線沿線全域への展開を視野に、
保全業務のさらなる効率化が期待されています。
まとめ
Minervαは単なる点検ロボットに留まりません。
インフラ保全における業務プロセスそのものの自動化を実現する第一歩といえます。
そのことは、ロボットが製造業のみならず、社会インフラの維持管理においても
高く貢献できることを示しています。
ロボット導入の対象は
“現場作業”から“保全業務”へと
確実にシフトしつつあります。
今後の検証結果と実用化の動向に注目です。