タイヤメーカーとして知られるブリヂストンが、FA分野への取り組みを加速させています。
同社の社内ベンチャーであるブリヂストン ソフトロボティクス ベンチャーズは、
10kgを超える重量物を把持・搬送可能な大型ソフトロボットハンドを開発しました。
本製品は、ファクトリーイノベーションWeek2026にて初公開されました。そのため、自動車・重工業分野を中心に注目を集めています。
出典元:https://xtech.nikkei.com/atcl/nxt/column/18/00001/11440/
展示デモから見るロボットハンドの想定用途
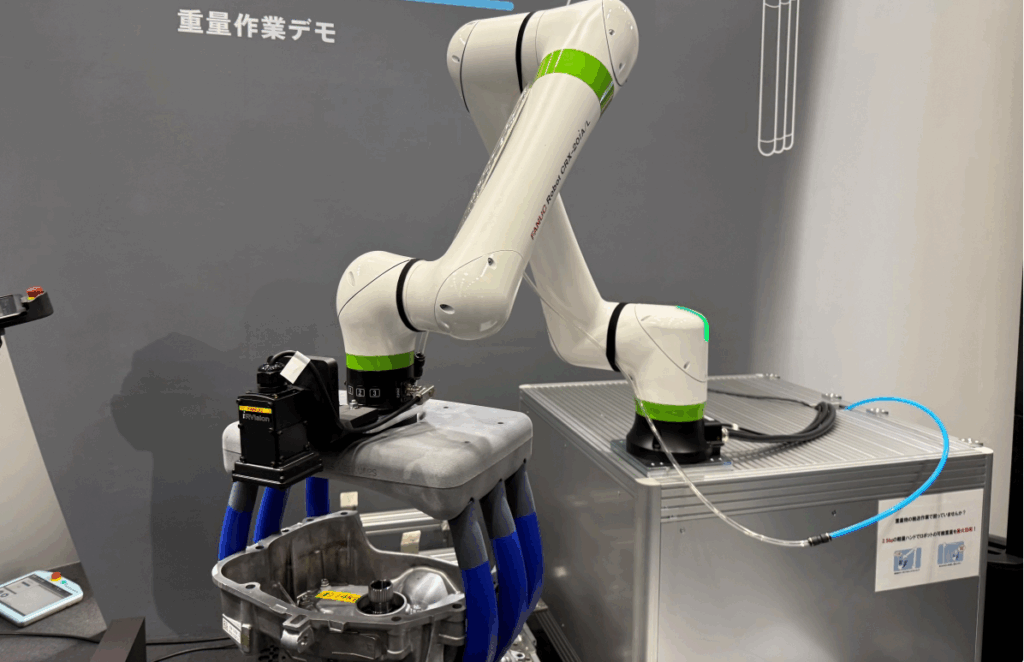
会場では、自動車工場を想定したデモンストレーションが行われました。
- 約14kgのエンジン部品を把持し、棚へ搬送
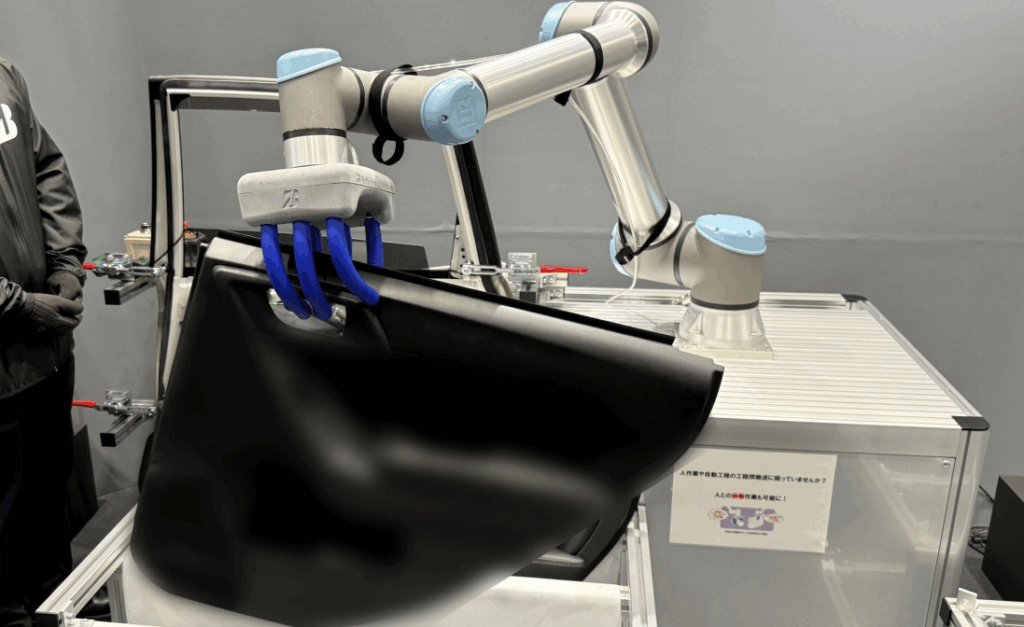
- 薄くて大きいドアトリム部品をつかみ、作業者へ受け渡し
注目すべき点は、質量・形状が大きく異なる部品を、1種類のハンドで扱っていることです。そのため、従来のように、
- ワークごとに専用ハンドを設計
- 形状変更のたびに段取り替え
といった作業を無くすことができ生産性の向上につながります。
人工筋肉の仕組み|シンプルだがFA(ロボットハンド)向き

空気圧を加えると、チューブが膨張 → 繊維が横に引かれる → 軸方向に収縮
という挙動を示します。
また、ゴムチューブと板バネ、それを覆うアラミド繊維の3種で構成されています。それにより、耐久性は百万回繰り返しても大丈夫という事です。
この構造は、パンタグラフ機構に例えられることが多く、シンプルでありながら高い出力密度を実現しています。
屈曲は、曲げたい方向に対して背側に板バネを内蔵する。これにより、ゴムチューブ膨張時の屈曲方向が決まる。
人工筋肉の内部には、曲げたい方向の背側に板バネが組み込まれています。
これにより、
- どの方向に曲がるかを機械的に規定
- 制御を複雑にしすぎずに屈曲動作を実現
空気圧ロボットハンドを選択した理由と今後
人工筋肉は油圧・水圧でも駆動可能ですが、今回の市場投入では空気圧が選ばれています。また、ブリヂストンは過去、の研究プロジェクトにおいて油圧人工筋肉にも取り組んできました。
実際、油圧で駆動した方が、人工筋肉として10倍の力が出るという。だが、油は人工筋肉から漏れた際の制御が難しく、空気に比べて安全面での不安もある。音山氏は、「まずは空気から、民間での実績を積み上げていく」と話す。
iCOM技研視点|このロボットハンドが示すもの
本製品は、現時点ではまだ量産ラインへの正式導入実績はありません。
一方で、自動車・重工業など数十社が試験採用を進めているとされています。
FAの現場視点で見ると、
- 専用ハンド前提の自動化
- ワークばらつき=人手対応
という従来構造に対し、「1つのハンドでどこまで吸収できるか」
という新しい設計思想を提示しています。
今後、
- 協働ロボットとの組み合わせ
- 人作業の部分置き換え
- フィジカルAIとの連携
ソフトロボットハンドはFAの選択肢の一つとして定着していく可能性があります。