カメラキャリブレーションについて解説!
OpenCVライブラリを使った簡単なキャリブレーションの方法について解説します。 カメラキャリブレーションとは? 広角カメラ等で写真を撮ってみると画像が歪みます。主な歪としては放射状歪みと接線歪みがあります。放射状歪は画 […]
www.icom-giken.com
前回解説した4つのカメラキャリブレーションについて、さらに詳しく適性手法について説明していきたいと思います。
目次[]
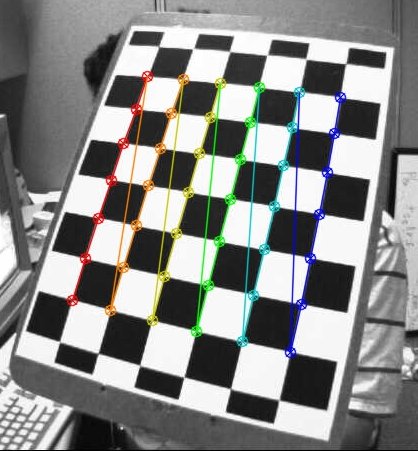
CheckerBoardは、主流なカメラキャリブレーション手法の一つであり、OpenCVで広くサポートされています。この手法を用いることで、以下のことが可能になります。
カメラの内部パラメータに関しては前回詳しく説明したので省略します。気になる方はこちらをご覧ください。
外部パラメータの推定にはいくつかの条件が存在します。
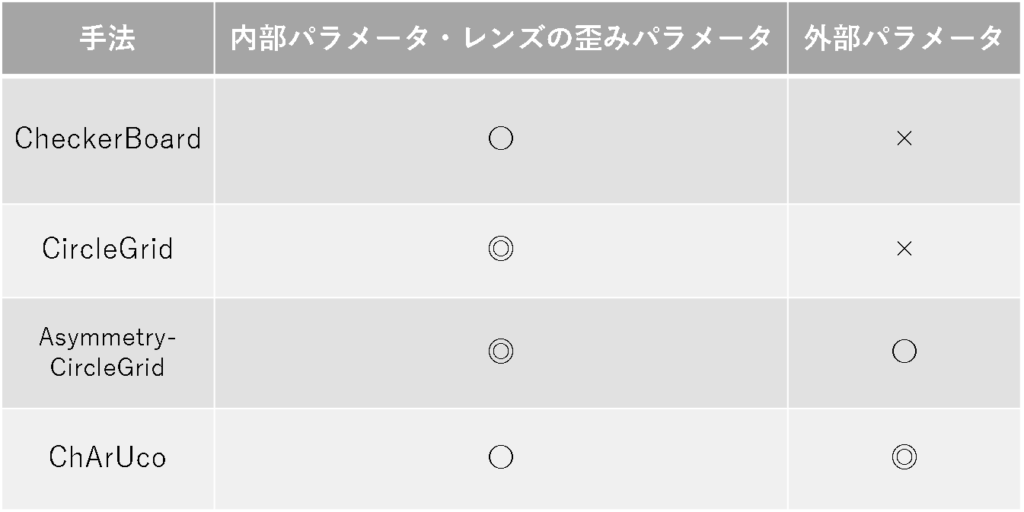
以下の表にまとめたように、カメラの設置条件によって推定の難易度や手法が異なります。

このように、ステレオカメラやマルチカメラを用いることで、カメラ間の相対位置関係の推定が容易になります。一方で、単眼カメラの場合、固定された単一視点では推定が難しく、異なる視点から撮影する必要があります(PnP, SfM)。
*Perspective-n-Point:カメラの位置と姿勢(向き)を計算すること
*Structure from Motion:複数の画像から3Dを構築する技術
CheckerBoardパターンを用いることで、カメラの座標系とワールド座標系を統一することができます。これにより、複数のカメラ間で同じ基準の座標系を持つことが可能になります。
stereoCalibrate()関数を使用すると、回転行列(R)と並進ベクトル(T)を推定できます。findEssentialMat()やrecoverPose()を用いることで、エピポーラ幾何学に基づいた画像補正が可能になります。
CheckerBoardはパターンが対称的なため、回転角度が45℃を超えると認識精度に問題が生じます。マルチカメラや非対称にすることで回避することは可能ですが、外部パラメータを扱う際は注意が必要です。また、行×列によってもばらつきがあるので注意が必要です。

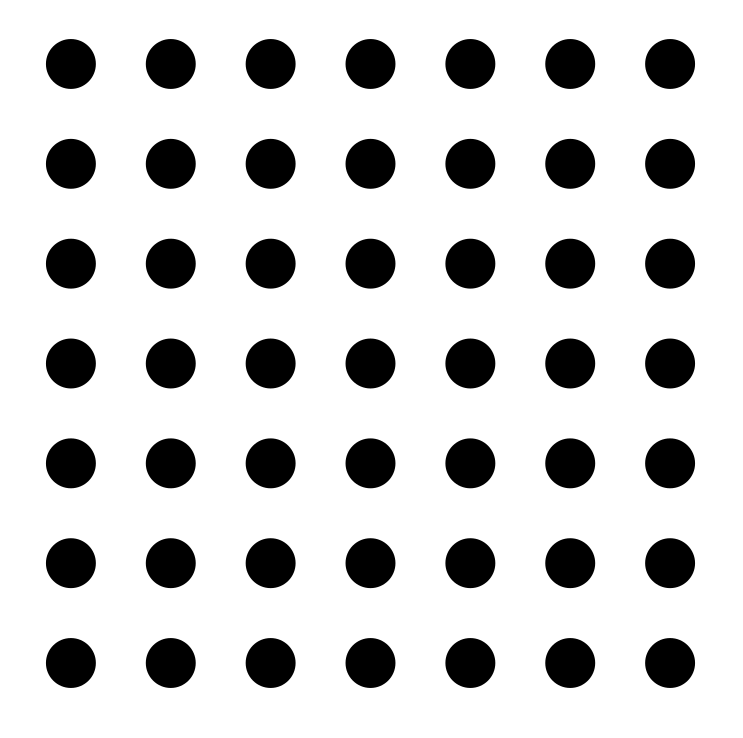
CircleGridは円形の中心を検出するので、四角形のCheckerBoardと異なり、エッジのノイズに左右されないことから、より高精度とされています。が、有意な差がみられないケースがあるので、自身で検証を行うことが大切です。
CircleGridもCheckerBoardと同様に、対称的なため単眼カメラの固定視点では外部パラメータを推定することはできません。PnPのように推定する手法も同様に使用できますが、45°以上の回転角度があると精度が低下していくといった課題もあります。
パターンを非対称とし、外部パラメータを推定可能に改変したものが下のAsymmetry-CircleGridです。
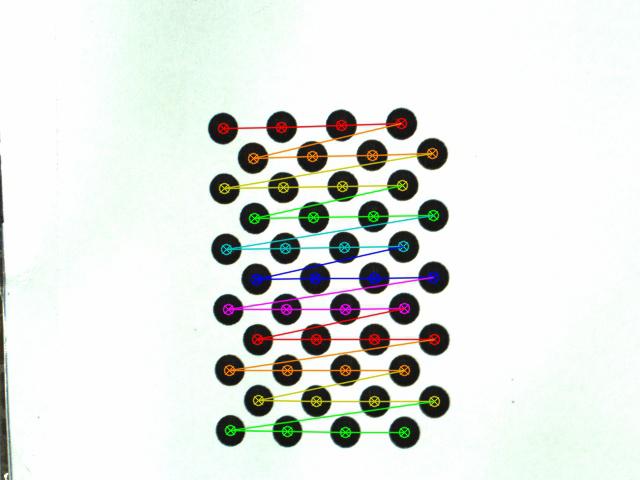
パターンが非対称なので、位置姿勢の検出が可能。より精密な位置決めが必要なもの(ロボットアームなど)に適している。
実装はこちらを参考に

ArUcoマーカーをCheckerBoardのように並べ、キャリブレーションボードとして用いる手法。この手法は、CheckerBoardよりも精度が高く、ボードの1部分が隠れていてもArUcoマーカー自体が姿勢を取得することができ、キャリブレーションすることが可能です。
実装はこちら


「自社の荷物で本当に自動化できるのか?」
そんな不安をお持ちの方も、iCOM技研なら安心です。
箱のサイズ・重量・品種情報をお送りいただければ、実機を用いたシミュレーションが可能です。
iCOM技研では、ユニバーサルロボットをはじめとする各種ロボットメーカー製品を取り扱っています。そのため、用途や作業環境に応じた最適なシステムをご提案します。
まずはお気軽にお問い合わせください。
お客様の現場に即した自動化の第一歩をお手伝いします。
協働ロボット導入をお考えなら、まずはこちら。
初心者の方でも基礎からわかる3つの資料が手に入ります。