
カメラキャリブレーション手法の徹底解説!
前回解説した4つのカメラキャリブレーションについて、さらに詳しく適性手法について説明していきたいと思います。 前回の内容 CheckerBoardでできること CheckerBoardは、主流なカメラキャリブレーション手 […]
www.icom-giken.com

OpenCVライブラリを使った簡単なキャリブレーションの方法について解説します。
目次[]
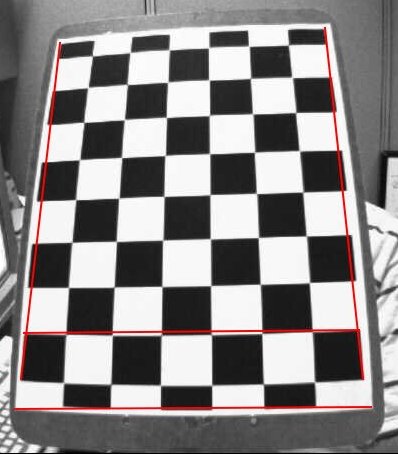
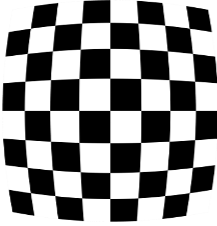
広角カメラ等で写真を撮ってみると画像が歪みます。主な歪としては放射状歪みと接線歪みがあります。放射状歪は画像の中心から離れるほど歪は大きくなります。例えば以下の画像を見てください。チェスボードのエッジに沿って赤線を引いていますが、少しだけチェスボードが湾曲しているのが分かると思います。
各要素の代表的な用途として、レンズによる画像の歪みを補正したい場合は内部パラメータおよびレンズ歪みパラメータが必要になります。
カメラで検出したカメラ座標系基準のワーク姿勢をロボット座標系基準に変換したい場合は、外部パラメータが必要になります。下でさらに詳しく説明します。
カメラキャリブレーションの外部パラメータは、カメラ座標系をワールド座標系に変換するための情報です。簡単に例えると、カメラから見てどの位置にあるか?といったカメラ基準の座標にすることです。
外部パラメータは、回転行列 R と 並進ベクトル tの2つの要素で構成されます。回転行列 R(3×3行列)をワールド座標に掛けることでカメラ座標から見た3次元点の外部パラメータは、回転行列 R と 並進ベクトル tの2つの要素で構成されます。回転行列 R(3×3行列)をワールド座標に掛けることでカメラ座標の姿勢から見た3次元点の方向を求めることができます。最後に、並進ベクトル tを掛けることで、ワールド座標系の原点からカメラの原点までの平行移動を表現します。
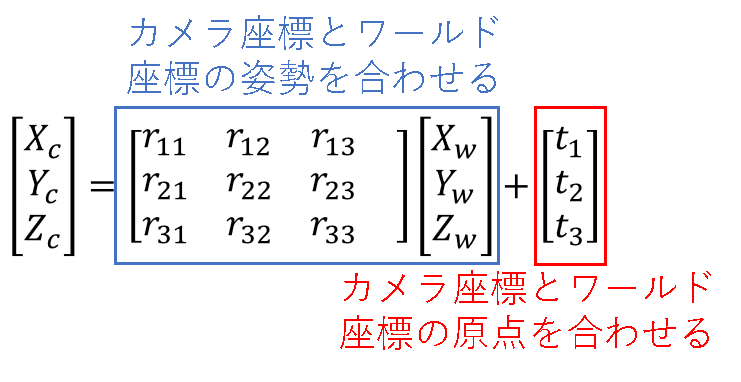
変形して、
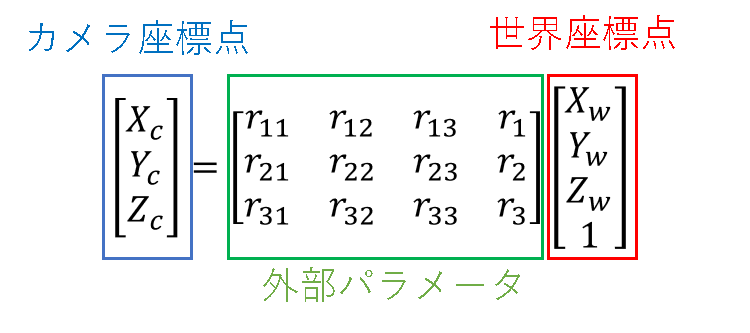
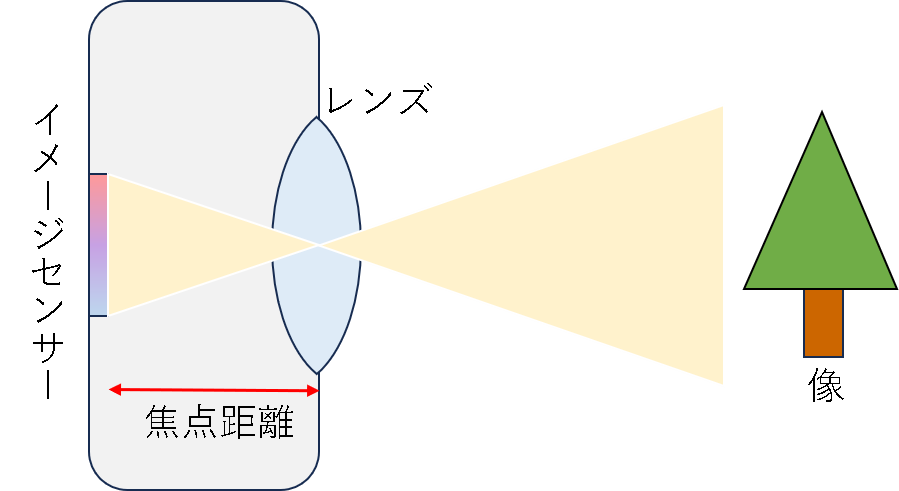
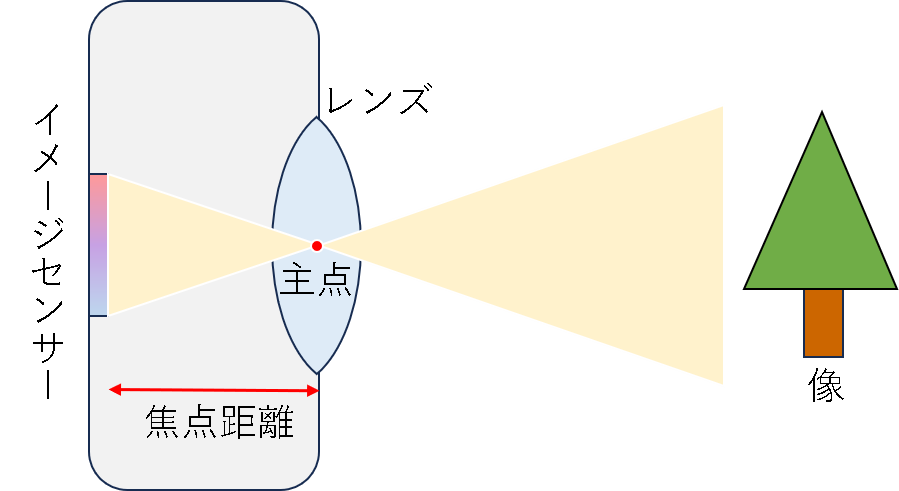
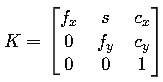
カメラキャリブレーションの内部パラメータとは、カメラの光学的特性や撮影時の設定を定量的に表すもので、以下のパラメータを含みます。

この式を、水平方向(fx)と垂直方向(fy)の値が異なる場合があることから、水平方向と垂直方向別々に考ると、
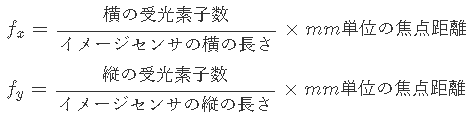
になる。
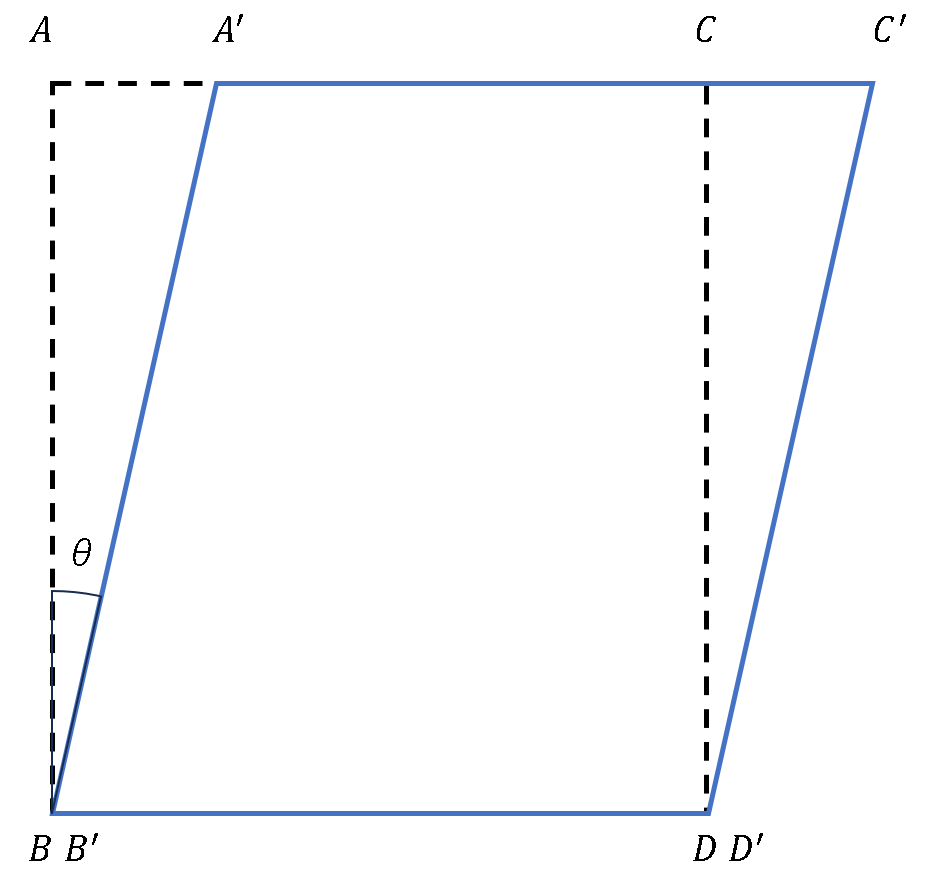
せん断係数s=tanθで求めることができる。
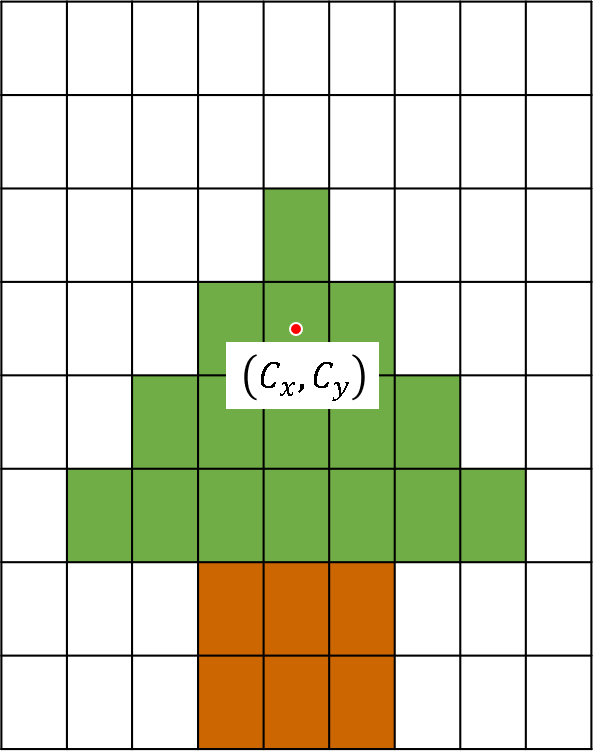
内部パラメータはカメラ行列Kとして次のように表されます:
実際のレンズには歪みがあり、特に広角レンズでは顕著。
放射歪み(Radial Distortion): 画像の中心から遠くなるほど拡大・縮小が生じる。
放射歪みを補正するには以下の式を用います。

接線歪み(Tangential Distortion): レンズがイメージセンサーに対して完全に平行でないときに発生する歪み
接線歪みを補正するには以下の式を用います。

このとき、rは中心からの距離なので、
で求まる。

これらのパラメータを推定するためにチェスボードのような、歪がなかったらどのように見えるか分かっているパターンを何枚か撮影しカメラに補正を行います。これがカメラキャリブレーションの概要です。

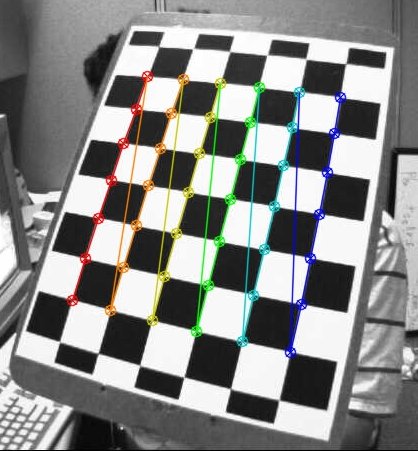
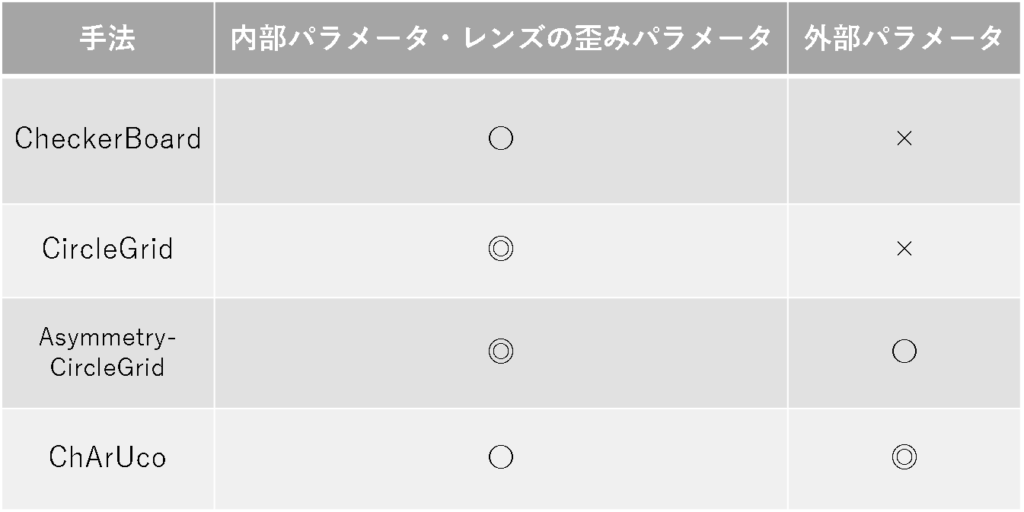
チェッカーボード(市松模様)は、カメラキャリブレーションの最も一般的なターゲットの一つです。白と黒の正方形が交互に並んだパターンを用いて、キャリブレーションを行います。
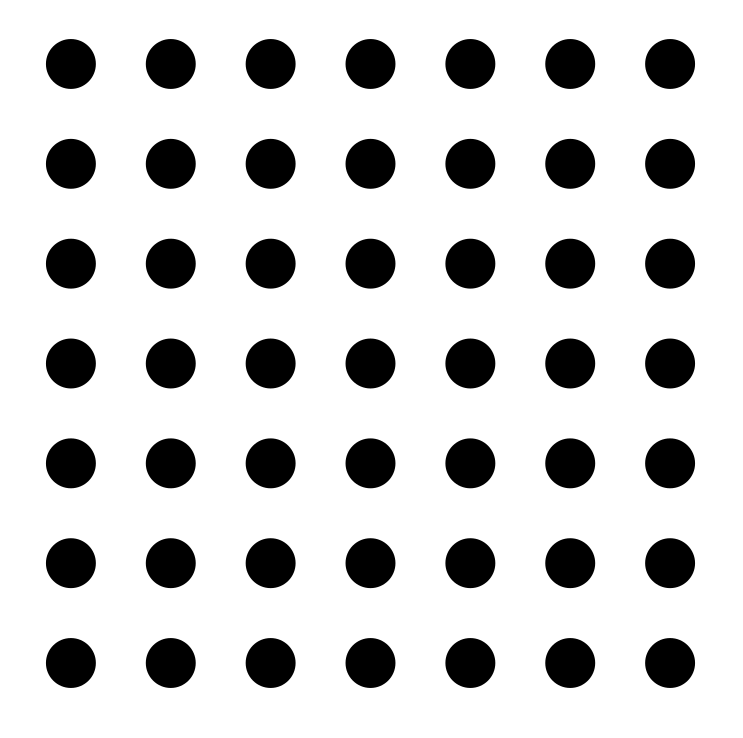
サークルグリッドは、等間隔に配置された円を用いるキャリブレーションターゲットです。円の中心を特徴点として利用します。
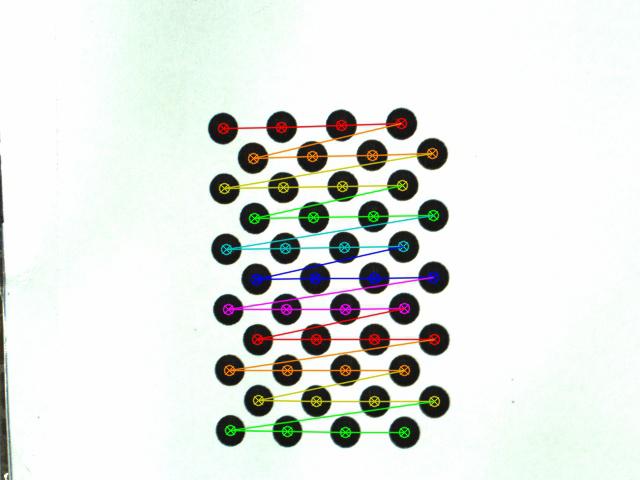
非対称サークルグリッドは、円の配置が非対称なパターンを用いる手法です。
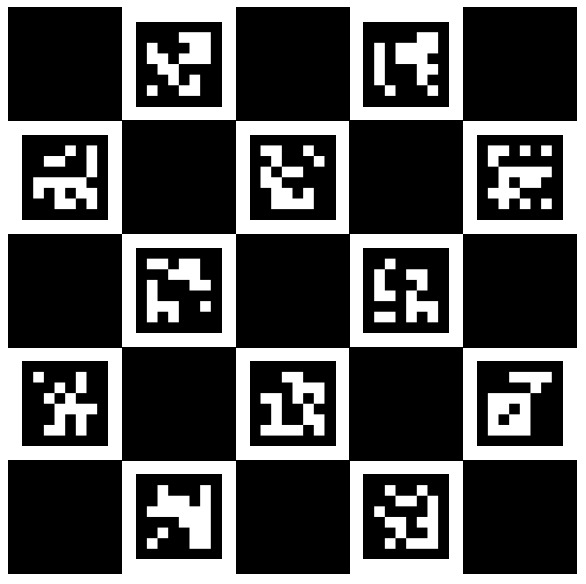
ChArUcoは、「Checkerboard」と「ArUco(マーカーベースのAR)」を組み合わせたキャリブレーションターゲットです。
こちらのブログでそれぞれの手法をさらに詳しく解説しています!
ロボットのビジョンシステムを用いる上で、カメラキャリブレーションは欠かせない要素の一つです。プログラムが正確でも、センサーが正しい値を返さなければすべて水の泡です。適切なキャリブレーションを行うことで、歪みの補正や座標変換の精度を高め、ロボットの動作をより正確に制御することができます。特に、複数のカメラを使用するシステムや高精度な計測を必要とするアプリケーションでは、キャリブレーションの重要性がさらに増します。
実際の運用では、キャリブレーションの結果を定期的に確認し、環境の変化や機器の経年劣化による影響を最小限に抑えることが求められます。ロボットビジョンの精度を向上させるためには、キャリブレーションの正確さだけでなく、その維持管理も重要なポイントとなるでしょう。

「自社の荷物で本当に自動化できるのか?」
そんな不安をお持ちの方も、iCOM技研なら安心です。
箱のサイズ・重量・品種情報をお送りいただければ、実機を用いたシミュレーションが可能です。
iCOM技研では、ユニバーサルロボットをはじめとする各種ロボットメーカー製品を取り扱っています。そのため、用途や作業環境に応じた最適なシステムをご提案します。
まずはお気軽にお問い合わせください。
お客様の現場に即した自動化の第一歩をお手伝いします。
協働ロボット導入をお考えなら、まずはこちら。
初心者の方でも基礎からわかる3つの資料が手に入ります。









