近年、ロボットの活躍する場は急速に拡大しています。しかし、実環境では予測できない障害物や不正確なセンサーデータの影響を受けることが多く、安定した動作を維持することが課題となっています。今回は、ソニーはこの問題に対処するために開発した、新たなモデル予測制御技術「GS-SMPC(Stochastic MPC with Guard Saltation Matrix)」について紹介します。
目次[]
ロボット活用の課題
ロボットが不確実な環境で活動する際の課題には、以下のような点が挙げられます。
- 環境の不確実性:路面の凹凸や障害物、環境変化によりセンサーデータに誤差が生じる。
- 動作の失敗リスク:ロボットが転倒したり、計画した軌道から逸脱する可能性。
- 従来技術の限界:
- 深層強化学習による適応型学習は発展しているが、予測不能な動作が発生するリスクがある。
- 従来のモデル予測制御(MPC)では、接触時の不確実性を適切に扱う方法が確立されていない。
モデル予測制御技術「GS-SMPC」の技術概要
GS-SMPCは、従来のMPC技術*を改良し、ロボットの足が地面に触れる際の不確実性を考慮することで、より安定した動作を可能にする技術です。
*MPC技術…モデル予測制御
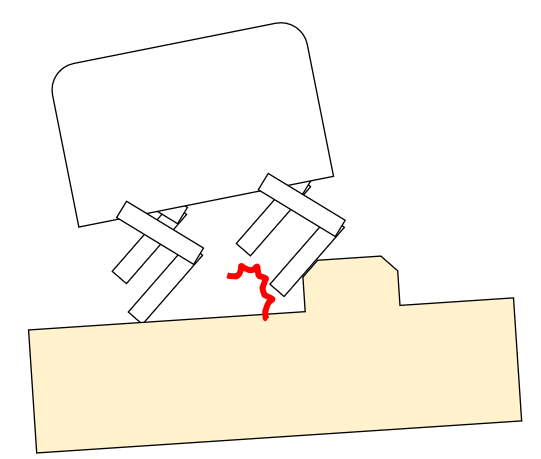
接触時の不確実性のモデル化
ロボットの歩行中、足が地面に接触すると動きが変化します。この変化を考慮し、状態をガウス分布(確率分布の一種)として扱うことで、不確実性を明示的に計算します。
跳躍行列(Saltation Matrix)とガード跳躍行列(Guard Saltation Matrix)の活用
- 跳躍行列:ロボットの足が地面に触れる前後の状態変化を数学的に表現。
- ガード跳躍行列:地面との距離を考慮し、適切な制御を行う仕組み。
リアルタイム最適化の工夫
- 計算負荷を抑えながら、リアルタイムで適切な動作を決定。
- カルマンフィルタを使い、予測誤差を修正し、精度を向上。
実験と評価
GS-SMPCの性能は、シミュレーションおよび実機実験で検証されました。
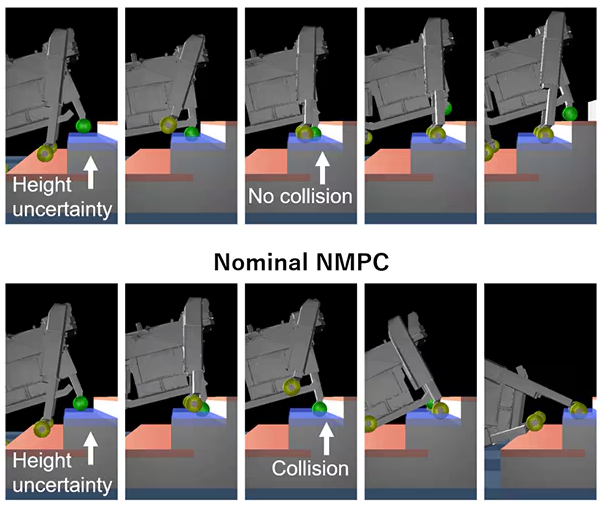
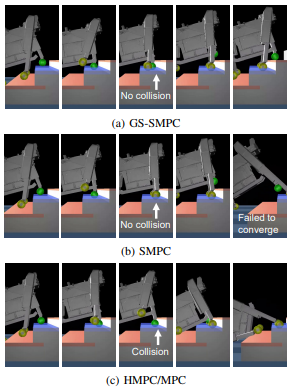
シミュレーション結果
- ソニーの6脚車輪ロボット「Tachyon 3」を使用し、高さ認識に±4cmの誤差を持つ環境での歩行テストを実施。
- GS-SMPCを適用した場合の成功率は100%、従来のMPCやヒューリスティックMPCでは50%未満の成功率。
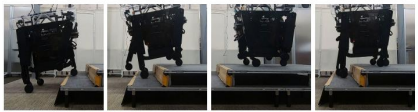
実機テスト
- Tachyon 3にGS-SMPCを適用し、1〜2段のステップをスムーズに昇降できることを確認。
- オンボードPC(Intel i7-8850H)での最適化計算時間は平均29msと、リアルタイム処理が可能な範囲。
https://arxiv.org/pdf/2403.14159
モデル予測制御技術「GS-SMPC」の今後の展望
ソニーはGS-SMPCの技術を強化学習と組み合わせることで、さらなる発展を目指しています。
強化学習との統合
- GS-SMPCによって導き出された動作軌道を、強化学習の初期値や目標値として活用。
- 試行錯誤の回数を削減し、より効率的な学習を実現。
課題の解決
- 2足歩行ロボット「EVAL-03」への適用では、成功率は向上したが、完全な安定性には課題が残る。
- 凹凸のある地面での歩行精度向上に向けたさらなる研究が必要。
参考文献
iCOM技研の取り組み
iCOM技研は、協働ロボットSIerとして様々な製造現場で活躍する協働ロボットを導入しています。溶接・研磨、パレタイザーなど人手不足に対する省人化・自動化に協働ロボットを用いたソリューションを図ります。関連業界のトピックや協働ロボットの導入事例をブログにしています。ぜひご覧ください。