製造現場では、人手不足や作業負担の軽減を目的に、ピッキング作業の自動化ニーズが高まっています。なかでも、箱やコンテナ内に不規則に入ったワークをロボットで取り出す「バラ積みピッキング」は、自動化が難しい作業の一つです。
本記事では、バラ積みピッキングの基本、難しさ、必要な構成要素について整理します。また、Thinkerのロボットハンドを一例に、近接覚センサーを活用した新しいアプローチについても解説します。
目次[]
バラ積みピッキングとは
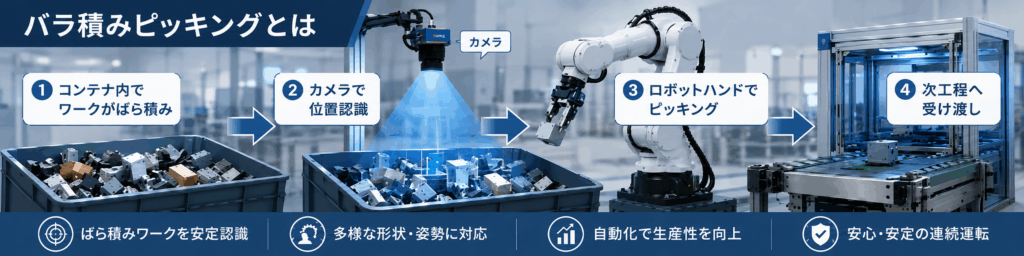
バラ積みピッキングとは、コンテナなどに不規則な姿勢で入っているワークを、ロボットが認識して一つずつ取り出す作業です。
整列されたワークを決まった位置から取り出す場合と異なり、バラ積み状態ではワークの位置や向きが毎回変わります。
そのため、ロボット本体だけでなく、カメラ、画像処理、ロボットハンド、照明、周辺装置を組み合わせて、システム全体で成立させる必要があります。
部品供給、検査工程への投入、加工機への投入、包装工程への供給、工程間搬送など、さまざまな工程で活用が検討されています。
バラ積みピッキングが難しい理由
バラ積みピッキングは、単に「ロボットで物を掴む」だけの作業ではありません。ワークの見え方、重なり方、掴み方、取り出し方は毎回変わります。そのため、安定した自動化が難しくなります。
ワークの位置・姿勢が毎回変わる
バラ積み状態では、ワークが表向き、裏向き、斜め、重なった状態など、さまざまな姿勢で入っています。
整列供給のように決まった位置へロボットを動かすだけでは対応できません。
そのため、カメラやセンサーでワークの位置・姿勢を認識し、その情報をもとにロボット動作を変える必要があります。
重なり・隠れ・引っ掛かりが発生する
バラ積み状態では、ワーク同士が重なったり、一部が隠れたりします。上から見えているワークでも、下側が他のワークに引っ掛かっていることがあります。
その場合、ハンドで掴めたとしても、ワークの脱落や巻き込みの可能性があります。
透明物・光沢物・黒色ワークなどは認識しづらい
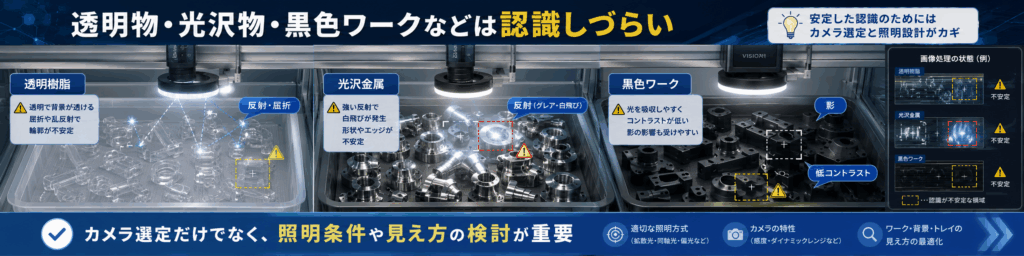
透明な樹脂部品、光沢のある金属部品、黒色ワークなどは、カメラや照明条件の影響を受けやすいです。
ワーク表面の反射や影によって、画像処理が安定しない場合があります。
そのため、カメラの選定だけでなく、照明条件やワークの見え方まで含めた検討が必要です。
掴めても安定して取り出せるとは限らない
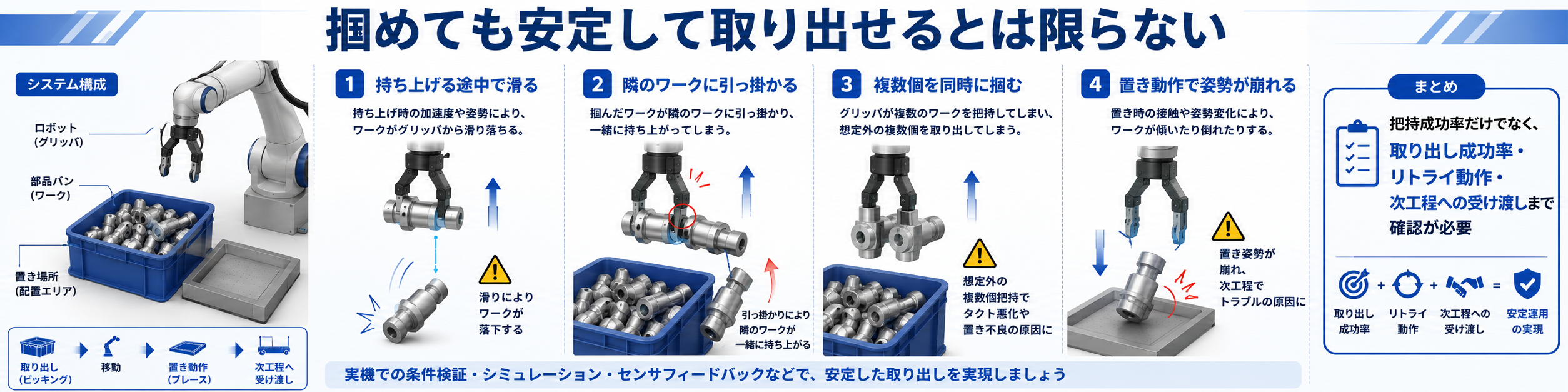
バラ積みピッキングでは、「掴めること」と「安定して取り出せること」は別です。
一度掴めても、持ち上げる途中で滑る、隣のワークに引っ掛かる、複数個を同時に掴む、置き動作で姿勢が崩れるといったことがあります。
SIer視点では、把持成功率だけでなく、取り出し成功率、リトライ動作、次工程への受け渡しまで含めて確認することが重要です。
バラ積みピッキングに必要な構成要素
バラ積みピッキングは、ロボットアーム単体では成立しにくい自動化です。ロボット、ハンド、カメラ、PC、周辺装置を組み合わせます。それぞれの役割を整理し、一連のシステムとして考える必要があります。
ロボット本体
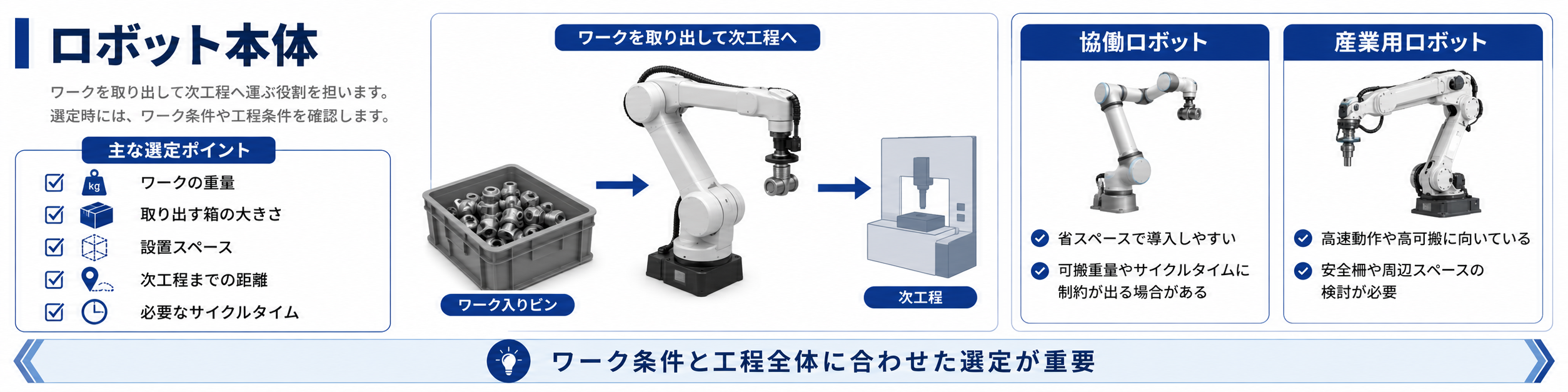
ロボット本体の選定は、下記の要件に合わせて選定します。
- ワークの重量
- 取り出す箱の大きさ
- 設置スペース次工程までの距離
協働ロボットは省スペースで導入しやすいです。一方で、可搬重量やサイクルタイムに制約が出る場合があります。
産業用ロボットは高速動作に向いています。しかし、安全柵や周辺スペースの検討が必要です。
ロボットハンド

ロボットハンドは、ワークを直接掴む要素です。バラ積みピッキングの成否を大きく左右します。カメラで位置を認識できても、ハンドが合わなければ安定して取り出せません。
ワークに合わせたハンド選定
ハンドには、吸着、チャック、柔軟指などがあります。箱物や袋物では、吸着が有効な場合があります。金属部品や樹脂部品では、チャックが使われます。傷つきやすいワークでは、柔軟指も選択肢になります。形状、材質、重量、表面状態に合わせて選定します。滑りやすさや変形しやすさも確認が必要です。
バラ積み状態での取り出しやすさ
バラ積み状態では、ワークの向きが毎回変わります。そのため、常に同じ位置を掴めるとは限りません。他のワークに引っ掛かる場合や爪が入る隙間がない姿勢になることもあります。掴めても、安定して取り出せるとは限りません。実ワークで把持と取り出しを確認することが重要です。
カメラ
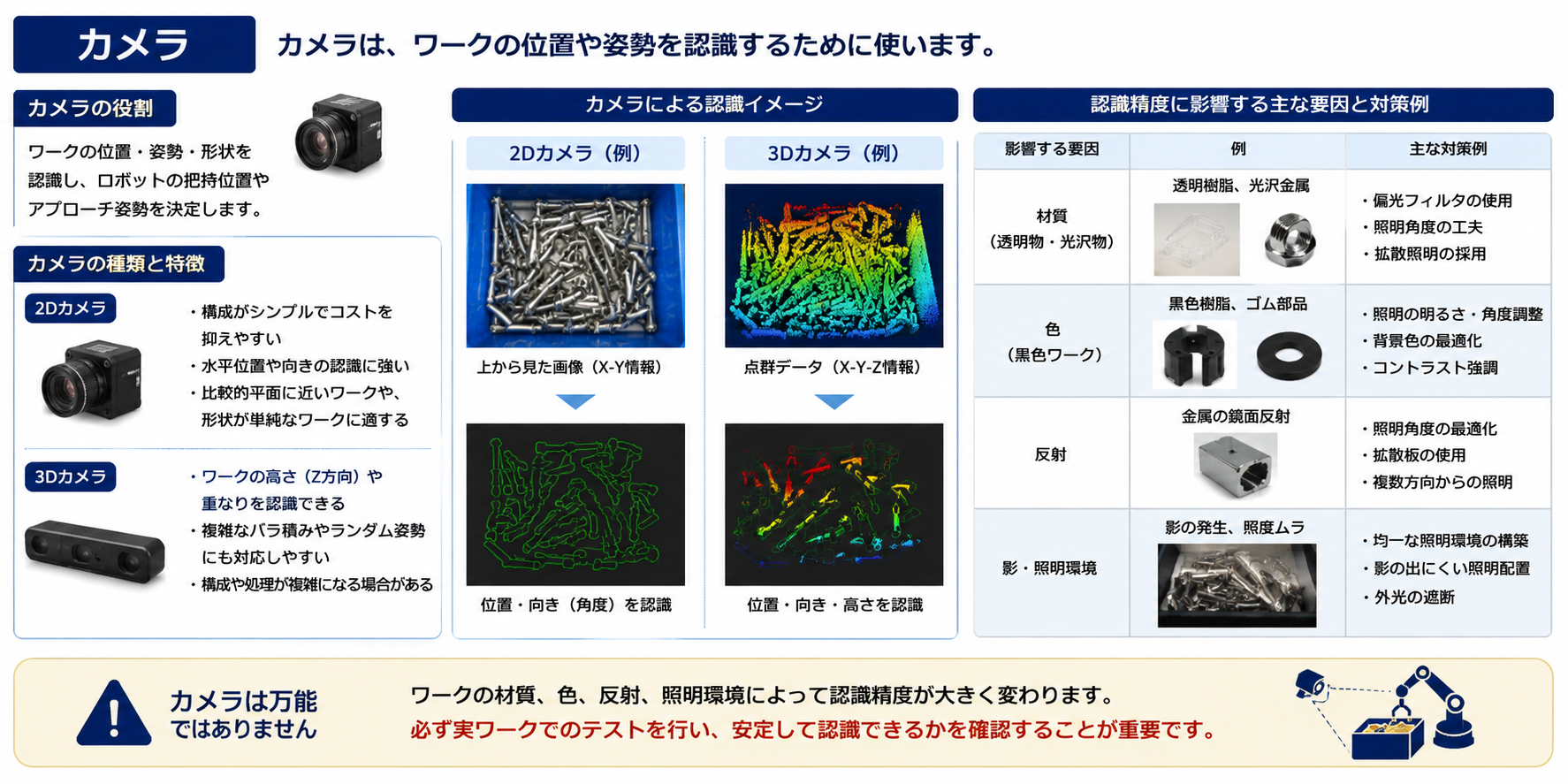
カメラは、ワークの位置や姿勢を認識するために使います。
2Dカメラは比較的シンプルな構成に向いています。一方、ワークの高さや重なりを認識したい場合は、3Dカメラを使うことがあります。
ただし、カメラは万能ではありません。ワークの材質、色、反射、照明環境によって認識精度が変わるります。そのため、実ワークでの確認が重要です。
画像処理・認識ソフト・制御PC
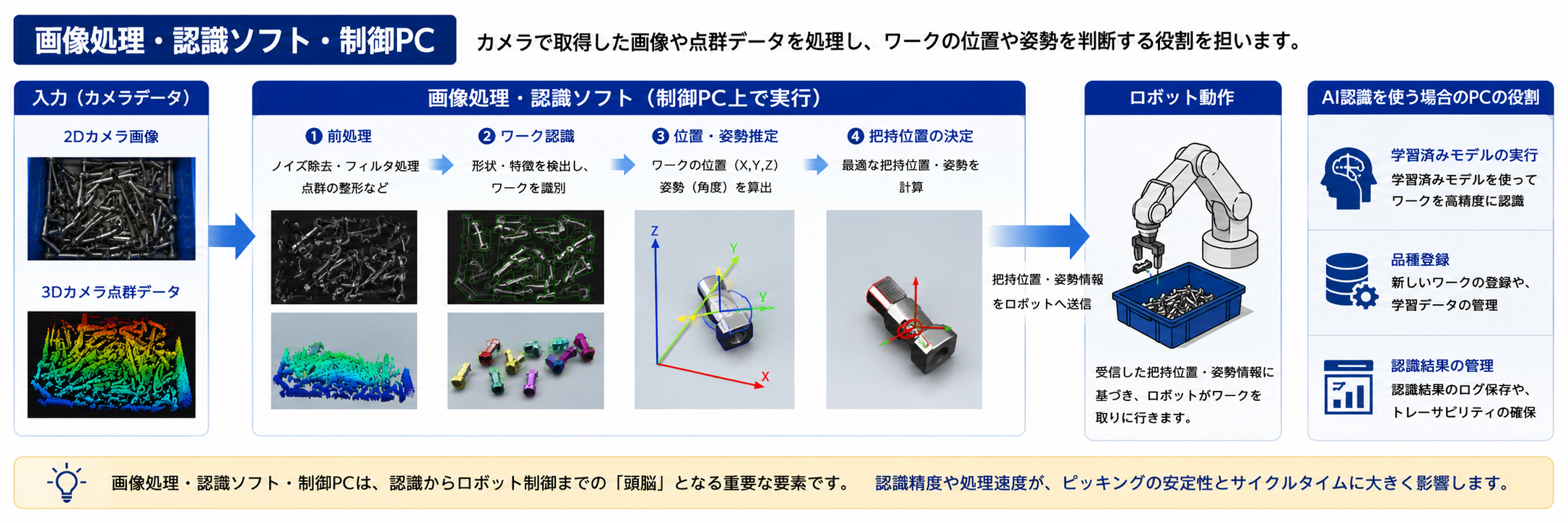
画像処理・認識ソフト・制御PCは、カメラで取得した画像や点群データを処理し、ワークの位置や姿勢を判断する役割を担います。
判断した把持位置の情報はロボットへ送られ、ロボットがワークを取りに行きます。
AI認識を使う場合は、学習済みモデルの実行や品種登録、認識結果の管理にもPCが関わります。
照明・コンテナ・周辺装置

ロボットとカメラだけでなく、周辺装置まで含めて検討する必要があります。
照明は、カメラ認識を安定させるうえで重要です。条件が変わると、同じワークでも見え方が変わり、認識が不安定になる場合があります。
また、コンテナの深さや形状、ワークの投入量、排出先のコンベアやトレーなども、システム全体の安定性に関わります。
バラ積みピッキングで使われるロボットハンド
バラ積みピッキングでは、ハンド選定が重要です。カメラでワークを認識できても、安定して掴めなければ自動化は成立しません。
ワークの形状、材質、重量、表面状態に合わせて、適したハンドを選ぶ必要があります。
| ハンドの種類 | 特徴 | 向いているワーク | 注意点 |
|---|---|---|---|
| 吸着ハンド | 真空吸着でワークを保持します。 | 箱物、袋物、板状ワークなど。 | 凹凸や通気性があると不安定です。 |
| チャックハンド | 爪でワークを挟んで掴みます。 | 金属部品、樹脂部品、小物部品など。 | 爪が入る隙間や姿勢が必要です。 |
| 柔軟指ハンド | 指先がワーク形状になじみます。 | 傷つきやすい物、不定形ワークなど。 | 把持力や耐久性の確認が必要です。 |
| 専用爪ハンド | ワーク形状に合わせて設計します。 | 形状が決まった部品や専用工程。 | 品種変更への対応が課題です。 |
| 近接覚・触覚センサー付きハンド | 対象物の状態を検知しながら掴みます。 | 位置ずれや姿勢ばらつきがあるワーク。 | 実ワークでの事前検証が重要です。 |
バラ積み状態では、ワークの向きや重なり方が毎回変わります。そのため、単に掴めるだけでなく、取り出しやすさまで確認する必要があります。
特に、柔らかいワークや認識しにくいワークでは、ハンド側の工夫が重要になります。
近年は、ハンドにセンサーを持たせる技術も登場しています。こうした技術は、カメラだけでは難しいピッキングを補完する選択肢になります。
Thinkerのロボットハンドに見る近接覚センサーの活用

近年は、カメラだけに頼らず、ロボットハンド側で対象物の状態を感じ取りながら掴む技術も登場しています。ここでは、Thinkerのロボットハンドを一例として、近接覚センサーを活用したアプローチを紹介します。
カメラだけでなくハンド側で対象物を”感じ取る”
Thinkerは、近接覚センサーを活用したロボットハンド「Think Hand F」や、バラ積みピッキング向けの協働ロボットパッケージ「Thinker Model A」を展開しています。
Thinkerのアプローチで特徴的なのは、カメラだけでワークを認識するのではなく、ハンド側でも対象物との距離や状態を感じ取りながら掴みにいく点です。
これにより、ワークの姿勢ばらつきや認識しにくい対象物に対して、新しいアプローチを示しているといえます。
「見る」と「掴む」を補完するロボットハンド技術
従来のバラ積みピッキングでは、カメラでワークの位置を認識し、その位置にロボットが取りに行く構成が一般的です。
一方、近接覚センサーを搭載したロボットハンドは、ワークに近づいた段階で対象物の状態を把握し、掴む動作を補完できる可能性があります。
つまり、カメラで「見る」技術と、ハンド側で「感じ取る」技術を組み合わせることで、ピッキングの安定性を高める考え方です。
バラ積み部品や柔らかいワークへの応用可能性
バラ積み部品や柔らかいワークは、位置や姿勢が安定しにくく、一般的なカメラやハンドだけでは対応が難しい場合があります。
Thinkerのような近接覚センサー付きハンドは、こうしたワークに対して、ハンド側で対象物の状態を確認しながら掴むという選択肢を示しています。
ただし、どのワークにも万能に対応できるわけではありません。実際の現場では、ワーク条件、供給状態、必要サイクルタイム、次工程との接続まで含めて検討することが重要です。
まとめ
バラ積みピッキングは、ロボット自動化の中でも難易度が高い作業です。ワークの位置や姿勢が毎回変わり、重なり、隠れ、引っ掛かりも発生するため、ロボット本体だけでは安定した自動化は難しくなります。
そのため、ロボット本体、ハンド、カメラ、画像処理、照明、コンテナ、周辺装置を組み合わせて、工程全体で検討する必要があります。
Thinkerのロボットハンドは、カメラだけでなくハンド側で対象物を感じ取りながら掴むという、新しいアプローチを示す技術例です。
SIer視点では、こうした新しい技術を一つの選択肢として捉えながら、実ワークと実工程に合わせて、最適な自動化構成を検討することが重要です。
※本記事では、バラ積みピッキングの技術例としてThinker社の製品を取り上げています。弊社での取扱製品として紹介するものではありません。
バラ積みピッキングのご相談はiCOM技研へ
iCOM技研では、協働ロボットを活用したピッキング、搬送、パレタイズなどの自動化提案を行っています。ワーク条件や現場環境に合わせて、ロボット本体、ハンド、カメラ、周辺装置を含めた構成をご提案します。
バラ積みピッキングでは、ロボット本体だけでなく、ワークの供給方法、カメラ、ロボットハンド、周辺装置、安全設計まで含めた検討が必要です。
「箱の中から部品を取り出したい」
「人が行っているピッキング作業を自動化したい」
「どのハンドやカメラが適しているか分からない」
このような課題がございましたら、実ワークや現場条件を確認したうえで、自動化の可能性をご提案いたします。

お問い合わせ・相談お待ちしております。「自社にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。