KiQ Roboticsの柔軟指は、ロボットグリッパーの指先を柔軟化し、ワーク形状にならって安定把持を目指すロボットハンドツールです。
製造業や物流現場では、ロボットによるピッキング、搬送、仕分け作業の自動化が進んでいます。
しかし、実際の現場では「ワークを安定してつかむこと」が大きな課題になります。ワークの形状が一定でなかったり、位置が少しずれたり、強くつかむと傷がついたりするためです。
こうした把持課題に対して、KiQ Roboticsはロボットグリッパーの指先を柔軟化する「柔軟指」を展開しています。
本記事では、KiQ Roboticsの概要、柔軟指の製品情報、AIロボットとの相性、追従性、導入時の確認ポイントについて解説します。
目次[]
KiQ Roboticsとは
KiQ Roboticsは、福岡県北九州市を拠点とするロボットベンチャーです。
主に、ロボットハンドツール「柔軟指」の開発・販売や、専用装置の受託開発を行っています。
同社の特徴は、ロボットアーム本体ではなく、ロボットがワークに触れる「指先」に注目している点です。
製造業や物流現場では、ロボットアームやAIビジョンの性能が向上しています。しかし、最終的にワークをつかむのはグリッパーです。
把持が安定しなければ、どれだけ認識精度やロボット制御が高くても、把持ミス、落下、チョコ停、ワーク傷につながります。
KiQ Roboticsは、このようなロボットハンドリングの課題に対して、柔軟な指先で解決を目指すメーカーです。
柔軟指とは(KiQ Robotics)
KiQ Roboticsの主力製品は「柔軟指」です。
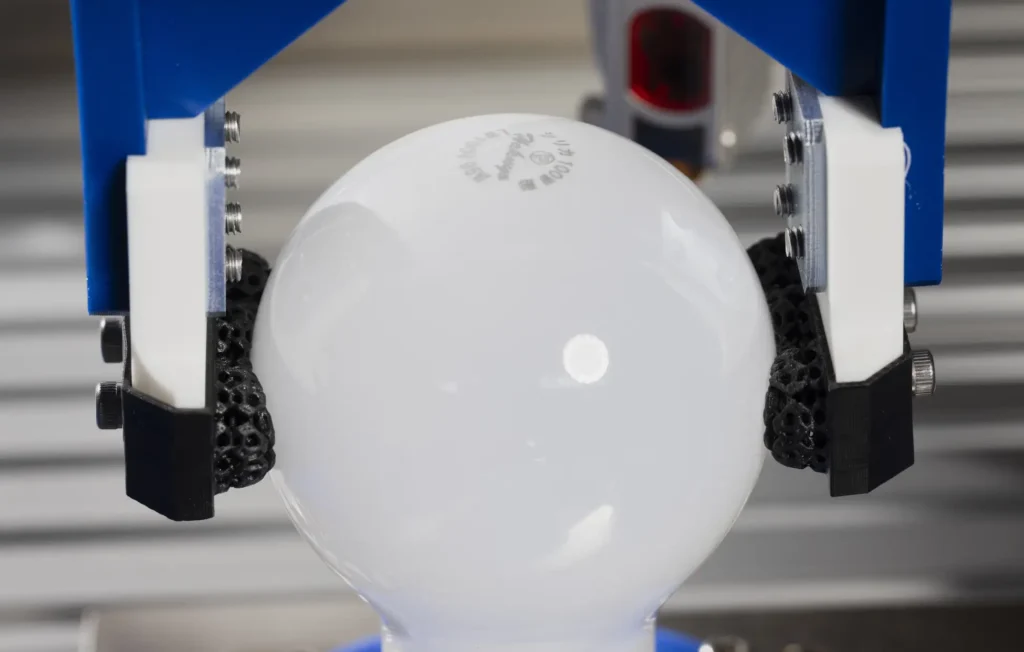
柔軟指は、ロボットグリッパーの先端に取り付けるロボットハンドツールです。グリッパー本体を置き換える製品ではなく、既存グリッパーの指先を柔軟化する部品です。
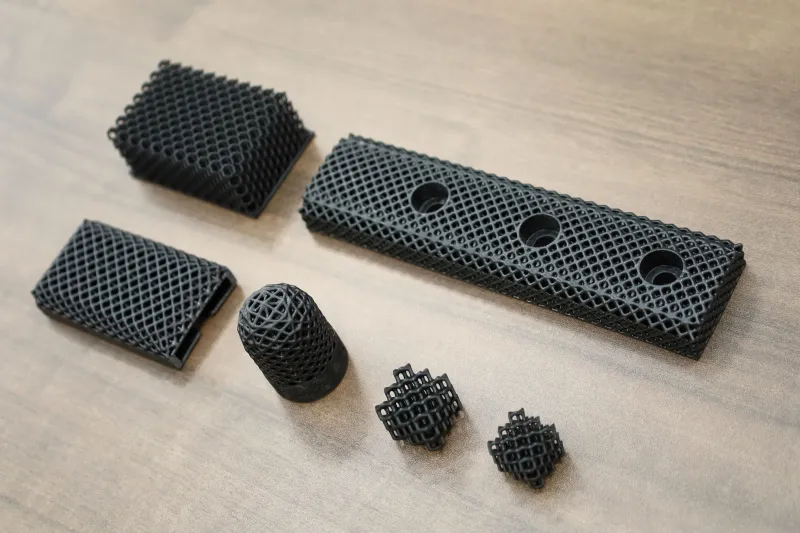
最大の特徴は、ラティスと呼ばれる格子状の構造です。
ワークに接触した際に指先が変形し、対象物の形状にならうことで、点や線ではなく面で接触しやすくなります。
これにより、低い把持力でも安定して搬送しやすくなり、把持ミスの低減やワーク傷の抑制が期待できます。
柔軟指が適しているケース
柔軟指が特に適しているのは、多品種ワークや形状ばらつきのあるワークです。
従来の硬いチャック爪では、ワークごとに爪を交換したり、専用治具を用意したりする必要がありました。
品種が増えるほど段取り替えが増え、ライン停止時間も長くなります。
一方、柔軟指はワーク形状にならって変形するため、1つの指で複数種類のワークを把持できる可能性があります。
そのため、段取り替え削減やライン稼働率の向上に役立ちます。
また、ワーク落下によるライン停止、ワーク傷による工程内不良、同時搬送時の取り残し、チャック爪の劣化や交換頻度の多さに悩む現場でも、改善効果が期待できます。
柔軟指が適さないケース
柔軟指は多くの把持課題に有効な選択肢になり得ますが、すべての用途に適しているわけではありません。
- 食品に直接接触する用途
- 70℃以上の高温環境
- バリのある金属ワーク
- 有機溶剤やエタノールが常時付着する環境
- クリーンルーム環境
- 静電気対策が必要な環境
さらに、ワークをねじる、押し込むといった動作がある場合も、ラティス構造への負荷を確認する必要があります。
導入前には、使用環境やワーク条件を整理したうえで、実ワークによる把持テストを行うことが重要です。
柔軟指が注目される理由

製造業では、多品種少量生産が増えています。
従来の硬いチャック爪では、ワークごとに爪を交換したり、専用治具を用意したりする必要がありました。
品種が増えるほど段取り替えが増え、ライン停止時間も長くなります。
一方、柔軟指はワーク形状に合わせて変形するため、1種類の指で複数ワークに対応できる可能性があります。
これにより、チャック爪交換の削減や、段取り替え時間の短縮が期待できます。
また、硬いチャック爪では、把持力が一点に集中しやすく、樹脂部品や塗装面、外観品質が重要な部品では傷や変形の原因になることがあります。
柔軟指は、ワーク形状にならって面接触しやすいため、接触圧を分散しやすい点も特徴です。
そのため、傷つきやすいワークや、外観品質を重視する製品の搬送にも向いています。
KiQ Robotics柔軟指の製品情報
| 項目 | 内容 |
|---|---|
| 製品名 | 柔軟指 |
| 製品分類 | ロボットハンドツール、グリッパー先端部品 |
| 構造 | ラティス構造 |
| 主な特徴 | ワーク形状にならう、面接触で把持、低把持力でも安定搬送しやすい |
| 期待できる効果 | 把持ミス低減、ワーク傷の抑制、段取り替え削減、多品種対応 |
| 対応グリッパー | OnRobot、Robotiq、SMCなど |
| 導入方法 | 標準品、柔軟指ジェネレータ、オーダーメイド |
| 素材タイプ | 高追従タイプA72、高耐久タイプA80 |
| 向いている用途 | 多品種ワーク、傷つきやすいワーク、不規則形状ワーク、部品搬送 |
| 注意が必要な用途 | 食品への直接接触、高温環境、バリ付き金属、クリーンルーム、静電気対策が必要な環境 |
柔軟指は、OnRobot、Robotiq、SMCなどの主要グリッパーに対応した標準品が用意されています。
また、ワーク形状や装置構成に合わせたオーダーメイド設計にも対応しています。
そのため、すでに使用しているロボットハンドを活かしながら、把持ミスやワーク傷、品種ごとの爪交換といった課題を改善したい現場で検討しやすい製品といえます。
耐久性と実績
柔軟指は、耐久性に関する検証データも公開されています。
トヨタ自動車での特定条件下の変形耐久試験では、400万回の繰り返し変形後も把持性能を確認したとされています。
また、リックスでの実運用では200万回以上の搬送実績、デンソーでの実運用では60万回以上の搬送実績が示されています。
もちろん、寿命はワーク形状、把持力、サイクルタイム、使用環境によって変わります。
そのため、実際の導入では、想定サイクル数や交換周期を含めて評価する必要があります。
フィジカルAIとの相性

柔軟指は、AIとの相性が良いロボットハンドツールです。
AIビジョンを使えば、カメラ画像からワークの位置や姿勢を認識できます。
しかし、実際の現場では、認識結果と実際の把持位置にわずかなズレが生じることがあります。
このズレをすべてソフトウェアやロボット制御だけで補正しようとすると、システムが複雑になります。
そこで重要になるのが、グリッパー側の物理的な許容範囲です。
柔軟指がワーク形状や位置ずれに追従できれば、AI認識やロボット位置決めに求められる精度を少し緩和できます。
つまり、AIがワークを認識し、ロボットが動き、柔軟指が最後の接触誤差を吸収するという役割分担ができます。
今後、フィジカルAIの活用が進むほど、現実のワークに安定して触れるエンドエフェクターの重要性は高まると考えられます。
追従性が重要になる理由
柔軟指における追従性とは、指先がワーク形状や位置ずれにならう能力を指します。
硬いチャック爪の場合、ワークの位置や角度が少しずれるだけで、片当たりや把持ミスが発生することがあります。
一方、柔軟指は接触時に変形するため、多少の形状差や位置ずれを吸収しやすくなります。
この特性は、不規則形状のワークや、多品種ワークの搬送で有効です。
ただし、柔軟指だけで万能になるわけではありません。
ワーク重量、表面摩擦、把持方向、ロボット速度、サイクルタイム、周辺治具との干渉などを含めて、実ワークで検証することが重要です。
KiQ Robotics柔軟指と一般的な把持方法の違い

柔軟指の大きな特徴は、既存グリッパーの指先だけを置き換えて、把持の安定性を高められる点です。
グリッパー本体を大きく変更せずに、指先だけを柔軟化できます。ワーク形状にならって接触しやすいため、多品種ワーク、傷つきやすいワーク、不定形ワークを扱う現場で使いやすい把持方法です。
そのため、柔軟指は「設備を大きく変えずに、把持ミスやワーク傷、段取り替えを減らしたい現場」に向いた選択肢といえます。
協働ロボットグリッパーを選定する際の注意点と流れ

どのようなワークを、どのような状態で、どの程度の頻度で扱うのか。この整理が不十分なまま機種を選定すると、後工程で必ず問題が発生します。
協働ロボット用グリッパー選定では、次の流れで検討することが重要です。
まずはワークを把持・吸着できるかを確認する
最初に確認すべき点は、対象となるワークを、安定して把持・吸着できるかどうかです。確認すべき主なポイントは以下のとおりです。
- ワークの重量・サイズ
- 形状(箱形、円筒形、不定形など)
- 材質(金属、樹脂、紙、食品など)
- 表面状態(平滑、凹凸、通気性の有無)
例えば、平坦に見えるワークでも凹凸や穴があると、真空吸着が不安定になることがあります。また、柔らかい素材のワークを剛性の高いグリッパーで掴むと、変形や破損を招く可能性があります。
重要なのは、「掴めるかどうか」ではなく「安定して掴み続けられるか」という視点です。
把持・吸着後のワーク状態に問題がないか
次に確認すべきなのが、把持・吸着後のワーク状態です。グリッパーで掴めたとしても、製品品質に影響が出てしまっては自動化の意味がありません。
よくある問題として、以下のようなケースがあります。
- 把持跡が製品表面に残る
- 吸着痕が意匠面に残る
- 把持時の圧力で変形する
- 応力が残り、後工程で不具合が出る
特に、医薬品・化粧品などの分野では、わずかな跡や変形が不良品につながることもあります。
ロボットとの接続性・システムとの親和性
協働ロボット用グリッパーでは、ロボット本体との接続性も重要な選定ポイントになります。確認しておきたい主な点は以下です。
- 配線・配管が複雑にならないか
- ロボットメーカー純正ソフト(URCapなど)に対応しているか
- 把持状態やエラー情報をフィードバックできるか
運用していく上でのコストを考慮する
グリッパー選定では、初期コストだけでなく、運用コストまで含めて考える必要があります。特に注意すべき点は以下です。
- エア・電気消費量が多くないか
- 消耗部品の交換頻度は高くないか
- 専用部品や交換部品の価格・入手性
これらは短期間では見えにくいものの、長期運用では確実にコスト差として表れます。
メンテナンス性が自動化の成否を左右する
最後に重要なのが、メンテナンス性です。メンテナンス性の低いグリッパーは、結果として自動化のランニングコストを押し上げます。そのため、以下のような点を確認しておくことが重要です。
- 清掃や点検が容易に行える構造か
- 消耗部品の交換が簡単か
- 故障時に迅速な対応が可能か
- 長期的に調達可能なグリッパーか
協働ロボットの価値は、止まらずに安定稼働し続けることにあります。
そのため、日常的な保守を前提とした設計かどうかも、重要な選定基準となります。
KiQ Roboticsに関するよくある質問
柔軟指の寿命はどのくらいですか?
柔軟指の寿命は、ワーク形状、把持力、サイクルタイム、使用環境によって変わります。
トヨタ自動車での特定条件下の変形耐久試験では、400万回の繰り返し変形後も把持性能が確認されています。
ただし、実際の寿命は使用条件によって異なるため、導入前に実ワークでの確認を行うことが重要です。
KiQ Roboticsの柔軟指を既存のグリッパーに取り付けられますか?
OnRobot、Robotiq、SMCなど、主要メーカーのグリッパーに対応した標準品が用意されています。対応外のグリッパーでも、チャック爪の取付穴やワーク形状に合わせたオーダーメイド設計が可能です。
そのため、既存設備を活かしながら把持性能を改善したい場合にも検討しやすい製品です。
柔軟指はフィジカルAIと相性が良いですか?
柔軟指は、フィジカルAIと相性が良いロボットハンドツールです。フィジカルAIでは、AIがカメラ画像やセンサー情報をもとに、現実空間でロボットを動かします。
しかし、実際の現場ではワークの位置ずれ、形状ばらつき、滑り、接触時の誤差が発生します。
柔軟指は、ワーク形状にならって変形しやすいため、最後にワークへ触れる部分で誤差を吸収しやすい点が特徴です。そのため、AIによる認識や判断と組み合わせることで、把持作業の安定化に役立つ可能性があります。
AIビジョンと柔軟指を組み合わせるメリットは何ですか?
AIビジョンは、ワークの位置や姿勢を認識するために使われます。
一方で、認識結果と実際の把持位置には、わずかなズレが生じることがあります。このズレをすべてロボット制御だけで補正しようとすると、調整が複雑になります。
そこで柔軟指を組み合わせることで、指先がワーク形状や位置ずれにならいやすくなります。
その結果、AIビジョンで認識したワークを、より安定して把持しやすくなります。特に、多品種ワークや形状ばらつきのあるワークを扱うピッキング自動化では、有効な組み合わせといえます。
iCOM技研による導入サポート|グリッパー導入の「壁」を取り除く

グリッパー導入に不安がある方でも、iCOM技研による以下のサポート体制で安心です。
- 使用目的に合ったモデル選定のコンサルティング
- 導入前の実機デモ・テストで効果を可視化
- ロボット操作教育、安全指導まで含めた現場立ち上げ支援
- ロボットシステム全体の提案(ハンドツール選定)
弊社では協働ロボットを中心とした様々なメーカーを取り扱っております。また、最適なロボット選定からシステム開発・立ち上げまで一貫してご支援可能です。
パレタイジングに関するお問い合わせ・相談お待ちしております。
「自社にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。
本記事は、KiQ Robotics社が提供する情報を引用しております。製品に関するお問い合わせや技術相談は、以下のリンクからお問い合わせください。