URロボットには「リモートTCP」という便利な機能があり、工具の“先端”を動作の基準点として制御することができます。
「ロボットを使ってバリ取りや研磨を自動化したいけど、細かい形状や複雑な工具の動きに対応できるの?」
そんな疑問をお持ちで方に向けて、便利機能の紹介・設定方法などを解説します!
目次[]
リモートTCPとは?
URロボットに限らず、産業用ロボットでは「TCP(ツールセンターポイント)」という考え方が重要です。
これは、ロボットに取り付けたツールの「動作基準点」のことです。
しかし現場では、工具が長い、回転している、先端が特殊な形をしていることが多くあります。
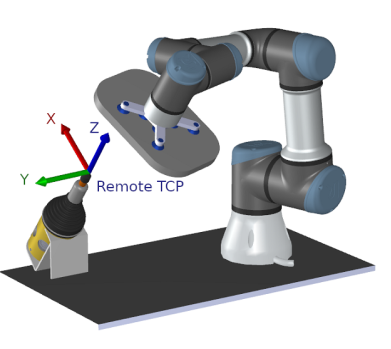
そんなときに使えるのが「リモートTCP」です。
リモートTCPは、「ロボットの先端」ではなく「工具の先端」に基準を置いて動かせる機能です。
通常のTCPとリモートTCPの違いとは
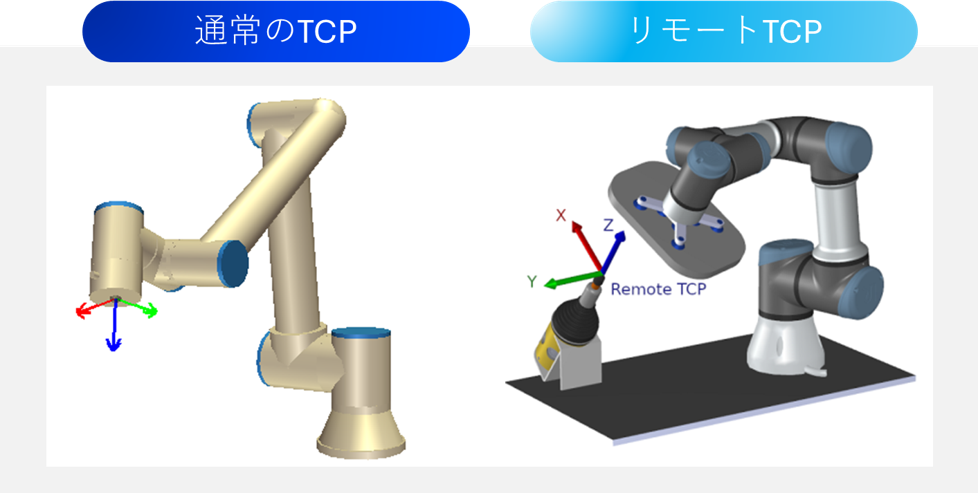
【違いをカンタンに言うと】
- 通常のTCP → ロボットの手先を基準に動く
- リモートTCP → 工具の先端を基準に動く
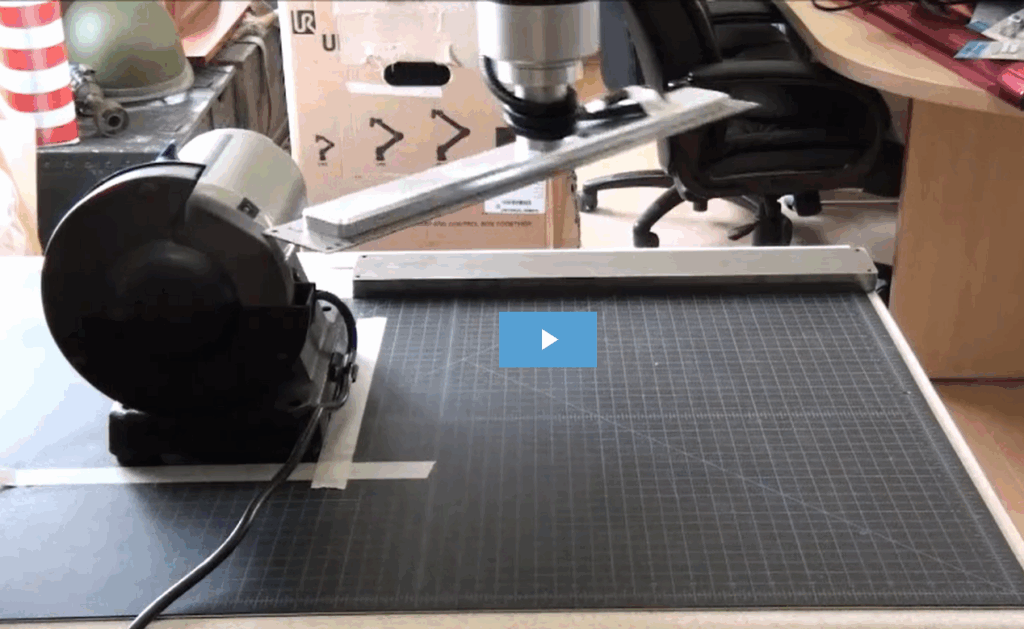
たとえば、長い棒の先端にグラインダーがついている場合。
リモートTCPを使うと、「棒の先端」がロボットの動作の中心になります。
これにより、正確に加工面をなぞったり、一定の角度を保って動かすことができます。
リモートTCPのメリット
| 項目 | メリット |
|---|---|
| 加工精度 | 工具先端が狙った場所に正確に届く |
| 安定性 | 角度や姿勢が保てる |
| 再利用性 | ツールを変えてもプログラムを流用しやすい |
URロボットでのリモートTCPの使い方
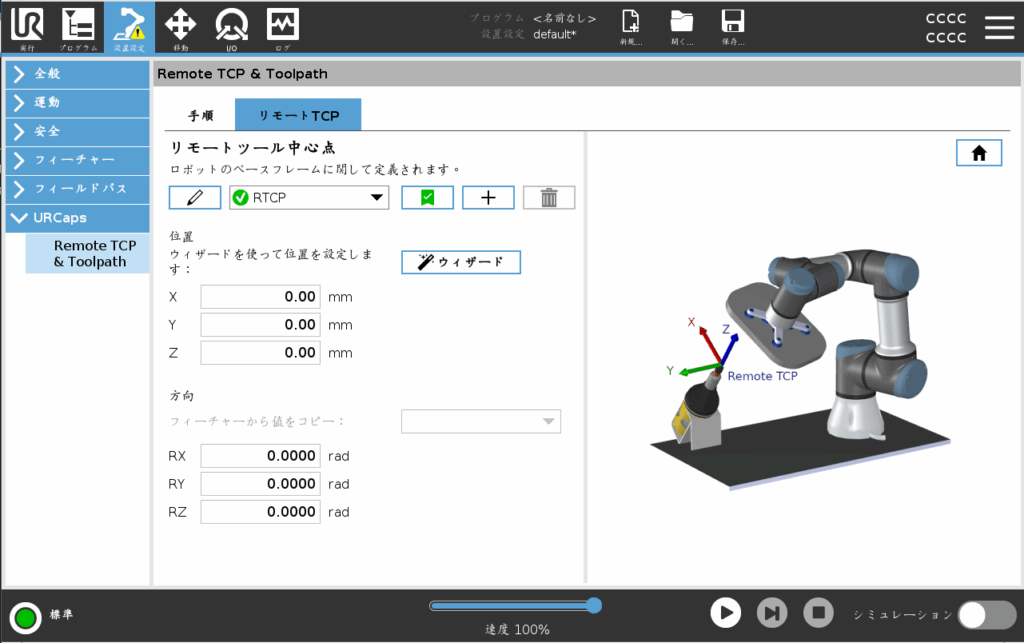
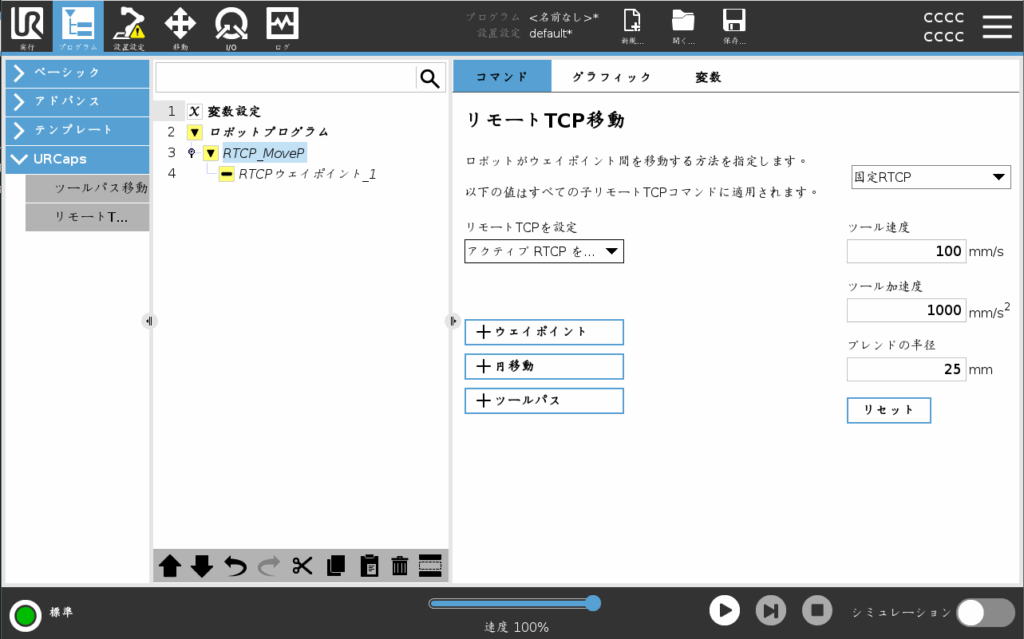
URロボット(UR3e, UR5e, UR10eなど)では、標準OS「Polyscope(ポリスコープ)」上でリモートTCPを簡単に設定できます
設定の流れ(かんたん説明)
- www.universal-robots.com/activateにサインインします
- ライセンスファイルをUSBドライブにダウンロードする
- USBドライブをティーチペンダントに接続し、「ロボットの設定」のURCapsをタップして「リモートTCP」を有効化します。
活用事例
①:バリ取り作業
課題:人手でのバリ取りは大変
- 作業者によって仕上がりが違う
- 細かい穴や曲面の処理が難しい
- ムラが出てしまう
リモートTCPで解決
- 工具の先端が常に正しい角度で当たる
- ワークの形に合わせて正確に動ける
- 人手を使わず、仕上がりが均一になる
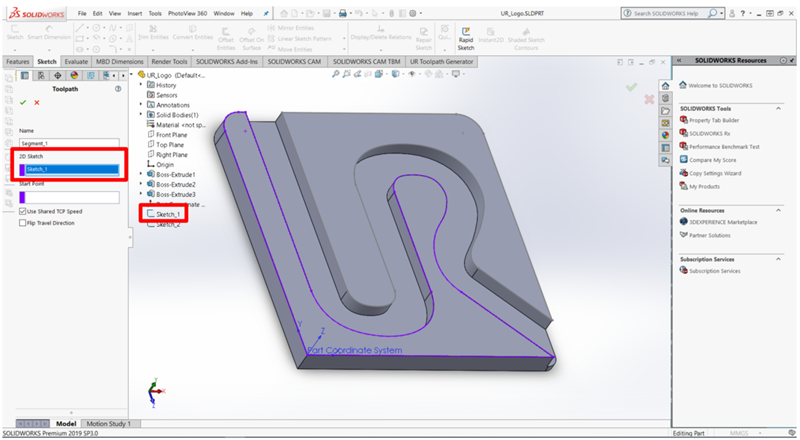
応用:SolidWorksとの連携も可能
②:宝石や貴金属の研磨
課題:超精密な研磨作業は人の感覚に頼りがち
- ワークが小さすぎて手作業ではブレやすい
- 回転治具との位置合わせが難しい
- 力加減によって仕上がりが変わってしまう
リモートTCPで解決
- 工具の「研磨点」を基準に動ける
- 回転台との同期もスムーズに
- 接触角度や圧力が一定で、仕上がりが安定
6. まとめ|リモートTCPでロボットの自由度が広がる
URロボットのリモートTCPは、工具の先端を「ロボットの手先」として扱える画期的な機能です。
これにより、研磨加工・バリ取りなど、これまで難しかった作業も自動化できます。
リモートTCPの機能を活用した自動化に興味のある方は、ぜひiCOM技研へお問合せください。