URロボットのソフトウェアバージョンアップについて「PolyScope」の新バージョン [PolyScope 5.21]が、2025年2月4日にリリースされました。
今回のアップデートでは、動作の安定性向上や操作性の改善など、多岐にわたる更新が含まれています。
その内容について解説します!
追加事項
OptiMove モーション追加
特定の移動ノードとウェイポイント ノードに新しいモーション コントロール タイプを導入し、ロボットの最大機能のパーセンテージ スケールに基づいて速度と加速度を最適化できるようにします。
OptiMove は、ハードウェア制限とペイロード設定内で可能な限り最速の速度と加速度を計算し、ユーザーはそれを希望するパーセンテージにスケールダウンできます。
OptiMove ロジックにより、より動的な加速と減速が可能になり、動きがスムーズになり、動きがぎくしゃくしなくなります。加速と減速がよりスムーズになると、移動速度も上がり、ロボットや搭載機器の振動や負荷も軽減されます。この複合効果により、一般的にサイクル タイムが改善され 、動きがよりスムーズになり、ロボットへの負担が軽減されます。
OptiMove は位置と負荷に基づいてロボットの最適な動作プロファイルを計算するため、サイクル タイムの改善のために速度と加速の設定を手動で最適化する必要はほとんどありません。
OptiMove の設定は、使用とセットアップを簡素化するためにパーセントで指定されます。計算に使用されるパーセンテージ設定:
- 速度 – ロボットの最大速度能力のパーセンテージとして目標移動速度を設定します。
- 加速 – 加速および減速中の目標トルク制限をロボットの最大出力のパーセンテージとして設定します。
新しいプログラムまたは既存のプログラムを適応させて、従来のモーションを新しい OptiMove モーションに置き換えることができます。
GUIの変更
MoveJ,MoveLのGUIにOptiMoveモーション パラメータを追加
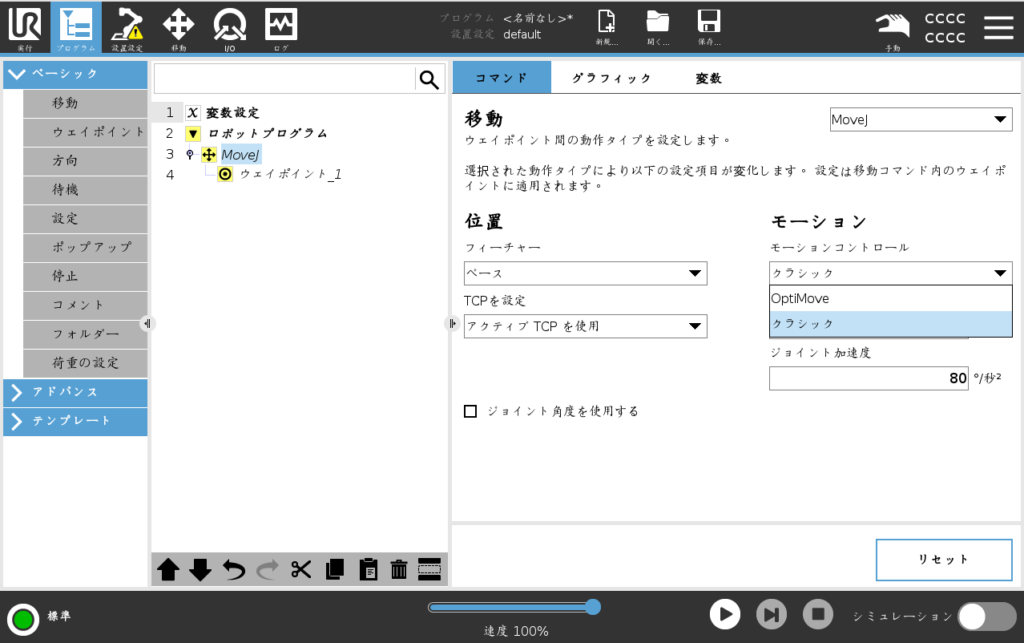
このソフトウェア リリースでは、新しいモーション コントロール ドロップダウンが導入され、クラシック モーション パラメータと OptiMove を切り替えることができるようになりました。
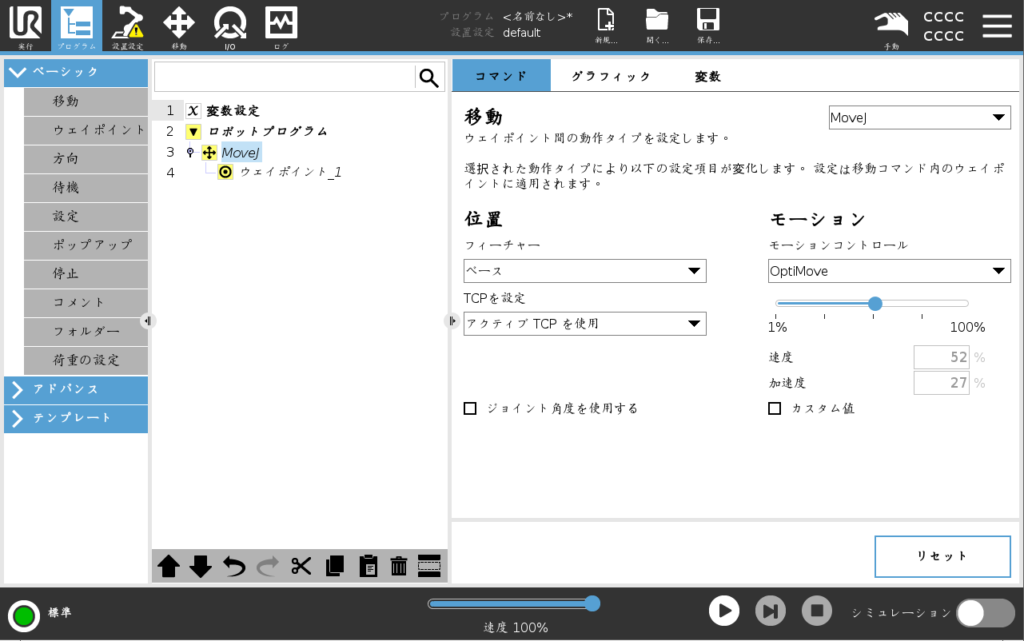
OptiMove を選択すると、新しいスライダーが速度のパーセンテージを制御し、スケールされた加速を適用します。このスライダーを調整することが、OptiMove パラメータを設定するデフォルトの方法になります。
「カスタム値」チェックボックスをオンにすると、速度と加速のパーセンテージを個別に設定できるため、OptiMove パラメータをより細かく制御できます。
OptiMove パラメータは、「共有パラメータ」を使用するように構成されている場合、移動ノードの下のウェイポイント ノードに適用されます。
WaypointにOptiMoveモーションパラメータを追加

新しいモーション コントロール ドロップダウンは単一のウェイポイントでも使用でき、この特定のウェイポイント ノードに対して OptiMove を選択できます。
スライダーは速度のパーセンテージを制御し、スケールされた加速を適用します。スライダーを調整することが、OptiMove パラメータを設定するデフォルトの方法です。
「カスタム値」チェックボックスをオンにすると、速度と加速のパーセンテージを個別に設定できるため、OptiMove パラメータをより細かく制御できます。
URCap APIの追加
後日紹介します。
バグ修正
PolyScope GUIの修正
- パレタイジングを使用してプログラムを実行し、アクティブ TCP を変更すると、到達不能なポーズが発生するという誤解を招く例外を修正しました。
コントローラの修正
- Ethernet/IP または PROFINET フィールドバスが有効な場合にリモート開始、一時停止、または停止を妨げる問題を修正
- リモート コントロール時にプログラムが起動直後に一時停止することがある問題を修正
- ロボットが「安全性を確認中」状態で応答しなくなる可能性があるセカンダリ プログラム キューの処理を修正