目次[]
はじめに
本記事では、製品やプロセスの品質向上を目指すためのテストプロセスを、現場での再現性を担保し、改善活動につなげる具体的な手法として解説します。
特に、テスト方針の検討、テスト条件の明確化、テスト実施手順の作成、そして記録・データ整理の4つのポイントに重点を置いて説明します。
さらに、実例として協働ロボットによる研磨テストの事例を取り上げます。この実例では、ロボットによる自動化で特に重要な、作業に使用するツールの情報、作業する現物(ワーク)の情報、作業前の状態の情報、および作業後の状態の情報も取り扱います。
この内容は、実験や検証の経験が浅い技術者の方にも分かりやすいように体系的に解説しています。
テスト方針の検討
目的と背景
テストプロセスを成功させるためには、まず現状の把握と課題の抽出が不可欠です。ここでは、現場の状況や既存の作業プロセスを正確に確認し、どのようにテストすべきかを明確にします。
現状の把握と課題抽出
- 現状の確認:
製造ラインや作業現場で使用されている設備、ツール、作業手順、環境条件(温度、湿度、照明など)を一覧化します。
例として、研磨工程では「研磨面の均一性が不足している」や「研磨ツールの摩耗が進行している」といった課題が挙げられます。 - 課題の抽出:
現状データや作業者のフィードバックを基に、具体的な問題点(例:部品の表面粗さが規定値に達していない、作業中の振動や温度変動が大きい)をリストアップします。
要件定義とテスト目標の設定
- 要件定義:
テスト対象の製品やプロセスの仕様、性能基準を明文化します。
例えば、金属部品の研磨では「表面粗さ(Ra値)が0.8μm以下であること」を数値目標として設定します。
また、ロボット自動化の場合は、使用する研磨ツールやワークの仕様(材質、形状、寸法)も明確にしておくことが重要です。 - テスト目標の設定:
要件に基づき、最終的なテスト目標を設定します。
例:- 研磨工程で均一な仕上がりを実現する
- ツール摩耗の影響を最小限に抑え、安定した研磨品質を維持する
リスク評価と対策
- リスク評価:
テスト実施時に発生する可能性のあるリスク(安全面、機器故障、作業環境の変動など)を事前に洗い出します。
例:協働ロボットが作業中に人と接近するリスク、センサーの誤動作によるデータの不整合など。 - 戦略策定:
各リスクに対する対策や、万一の場合の対応策を準備します。
例:安全センサーの追加、異常時の自動停止機能の確認、予備ツールの準備など。
テスト条件の明確化
目的
テスト結果に大きな影響を与える各種条件を具体的に定義し、テスト項目の整理と優先順位の決定を行います。
変数の洗い出し
再現性に影響する要素を洗い出します。
協働ロボットによる研磨の場合、以下の要素が考えられます:
- ロボットの動作速度
- 研磨圧力
- 研磨ツールの摩耗状態
- 作業環境の温度・湿度
さらに、自動化においては下記の情報も不可欠です:
- 作業用途のツール情報: 使用する研磨ツールの種類、状態、摩耗具合
- 作業する現物(ワーク)の情報: ワークの材質、形状、寸法など
- 作業前の状況情報: 前処理の状態、現状検査の結果、初期状態の画像や数値データ
- 作業後の状況情報: 仕上がりの品質、表面粗さの測定結果、検査画像など
条件の分類と優先順位
洗い出した変数や情報を、影響度や実現可能性に基づいて分類します。
たとえば:
- 環境条件: 温度、湿度、照明
- 機器条件: ロボットの制御パラメータ、センサー精度、研磨ツールの状態
- 作業条件: 作業手順、作業者の操作、連続作業時間
- 作業情報: ツール、ワーク、作業前後の状態
各項目ごとに優先順位を設定し、特に重要な条件(例:ツール状態やワークの初期状態)は重点的に検証します。
テスト項目のリストアップ
各条件に対応する具体的なテスト項目をリストアップします。
- ロボットの動作速度: 低速、中速、高速の各設定で研磨結果を比較
- 研磨圧力: 一定圧力と変動圧力での仕上がりを検証
- ツールの状態: 新品、中摩耗、完全摩耗状態での性能評価
- ワークの状態: 作業前と作業後の表面状態(画像・測定値)の比較
テスト実施手順の作成
テストシナリオの策定
テストをどのような流れで実施するか、全体のシナリオを構築します。
- 初期状態での基本テスト:
すべての条件を標準状態に設定し、ベースラインデータを取得する。 - 条件ごとの分割テスト:
個々の条件(例:動作速度、圧力、ツール状態、ワークの状態)を一つずつ変更し、その影響を順次検証する。
具体的な手順書の作成
テストの各ステップを詳細に記述し、誰が実施しても同じ結果が得られるようにマニュアル化します。
手順例:
- 準備段階
- 機材チェック:協働ロボット、研磨ツール、各種センサーの動作確認
- 作業前の現物(ワーク)の初期状態を検査(画像撮影、表面粗さの初期測定)
- 作業用途のツール情報(種類、状態)を記録し、必要なツールを準備
- データ収集システム(自動・手動)の起動、各種設定の確認
- 実施段階
- 各テスト項目ごとに設定値(例:動作速度、研磨圧力、ツールの状態)を入力し、テスト開始
- テスト中は、設定したチェックポイントで自動記録と手動チェックリストによる記録を実施
- 作業前と作業後の状態を、写真や数値データとして取得し、比較できるようにする
- 終了段階
- テスト終了後、全機材を安全に停止
- 得られたデータ(自動記録、手動記録、作業前後の検査結果)を一括して初期評価
- 改善点や次回のテストへのフィードバックとして、記録内容を整理
スケジュールとタイムラインの策定
ガントチャートなどを用い、各テスト項目の実施日時や期間を明確に設定します。
- 条件ごとのテスト実施日、休止期間、メンテナンス時間も含めた計画を策定
記録・データ整理
記録の重要性
正確な記録は、テスト結果の再現性を保証し、後の品質改善活動の基礎資料となります。
特にロボット自動化の場合、作業用途のツール情報、ワークの情報、作業前後の状態といった情報は、結果の正確な評価と改善に不可欠です。
記録方法の選定
自動記録と手動記録を併用することで、定量データと定性データの双方を確実に収集します。
- 自動記録:
センサーやデータロガーを活用し、研磨中の研磨力、動作速度、温度、振動などの数値データをリアルタイムで取得。
また、作業前後の画像データや表面粗さの測定値も自動取り込み可能な機器を利用する。 - 手動記録:
作業者がチェックリストやメモ、アンケート形式で、目視検査結果や作業感、作業前後の状態の変化など、定性的な情報を補完して記録。
データ整理と管理
- 整理方法:
収集したデータはExcel、CSVファイル、または専用データ管理ソフトに入力し、一元管理を行います。
条件ごとのデータをグラフ化し、どの条件が最も効果的であるか視覚的に比較できるようにします。 - 保存方法とフォーマットの標準化:
すべての記録には、日時、テスト条件、使用したツール・ワーク情報、作業前後の状態を含めた統一フォーマットを採用。
デジタルデータはクラウドストレージや社内サーバーにバックアップし、再現性のあるデータ管理体系を構築します。
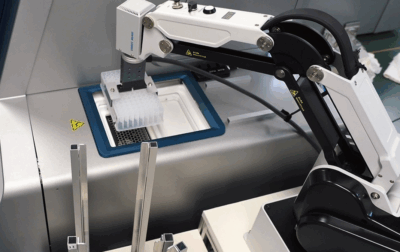
実例:協働ロボットによる研磨テストの適用例
事例概要
本事例では、協働ロボットを用いた金属部品の研磨テストを通じ、以下の情報が重要となる点を確認します。
- 作業用途のツール情報:
使用する研磨ツールの種類、摩耗状態、適正な交換タイミングの確認 - 作業する現物(ワーク)の情報:
ワークの材質、形状、寸法、初期状態の検査結果 - 作業前の状況情報:
作業開始前の現状検査(画像撮影、表面粗さ測定など)、前処理の状態 - 作業後の状況情報:
研磨後の仕上がり検査(表面粗さ、仕上がりの均一性、検査画像)
テスト方針の検討
・現状確認:
現場では、研磨工程において部品の表面にムラが見られること、また研磨ツールの摩耗が進んでいることが課題でした。
さらに、作業前のワークの状態がばらついていることも品質に影響を与えていると判断されました。
・要件定義:
研磨後の部品は、表面粗さ(Ra値)が0.8μm以下で均一な仕上がりであること。
さらに、使用する研磨ツールやワークの仕様を事前に記録し、作業前後の状態を明確にすることが求められます。
・リスク評価:
ツール摩耗、ロボットの動作不良、センサー誤動作のリスクに加え、作業前後の状態管理が不十分な場合、品質評価に影響が出るリスクを考慮。
テスト条件の明確化
- 変数の設定:
- ロボットの動作速度: 低速、中速、急速の各条件
- 研磨圧力: 一定圧力と変動圧力
- 研磨ツールの状態: 新品、中摩耗、完全摩耗
- ワークの状態: 作業前の現状(初期状態)と作業後の仕上がりの状態
- 条件分類と優先順位:
まずは、ロボットの動作速度と研磨圧力の組み合わせを重点的にテストし、次にツール状態およびワークの初期状態と仕上がりの違いを検証します。
テスト実施手順の作成
- 準備段階:
- 協働ロボット、研磨ツール、各種センサー(研磨力、温度、振動)の動作確認
- 作業前にワークの状態を詳細に検査(画像撮影、表面粗さの測定)
- ツール情報の記録(種類、状態、摩耗進行度)を実施
- 実施段階:
- 初期状態でのベースラインテストを実施し、その後、各条件(動作速度、研磨圧力、ツール状態、ワーク状態)ごとにテストを実施
- 各テスト実施中、センサーによる自動記録と作業者による手動記録で、作業中の数値データと作業前後の状態変化を記録
- 終了段階:
- テスト終了後、全てのデータ(数値データ、画像、チェックリスト)を整理し、テスト前とテスト後の評価を実施
- 結果に基づき、ロボットパラメータの最適化、ツール交換のタイミング、ワークの前処理方法の改善を検討
記録・データ整理
- 自動記録:
センサーからの数値データに加え、作業前と作業後の画像や検査結果が自動で記録され、各テスト条件ごとに保存。 - 手動記録:
作業者が、チェックリストに基づき、目視検査結果や作業感、作業前後の違いを記録。 - データ整理:
すべての記録はExcel等にまとめ、各条件ごとに数値と画像を揃えて視覚的に比較分析できる状態にする。特に、ツールやワークの状態の変化が研磨結果にどう影響しているかを詳細に分析。
まとめと今後の展望
まとめ
本記事では、テストプロセス全体を以下の4つのステップで整理しました
- 方針の検討
- 現状確認、課題抽出、要件定義、リスク評価を通じ、テストの方向性を明確化。
- 条件の明確化
- 製品やプロセスに影響を与える変数に加え、ロボット自動化に必要な作業用途のツール情報、ワーク情報、作業前後の状態を整理・優先順位付け。
- 実施手順の作成
- シナリオ策定と詳細な手順書作成により、誰が実施しても同一結果が得られる標準化されたテスト実施プロセスを確立。
- 記録・データ整理
- 自動記録と手動記録を組み合わせ、すべてのテストデータ(数値、画像、チェックリスト)を一元管理・分析し、再現性のあるテスト結果を保証。
以上、テストに関するプロセスを解説しました!テストに関するご相談がありましたら、お問合せをお待ちしております。