協働ロボットを安全に活用していくために重要になるリスクアセスメントについて、実施手順を具体例を用いてわかりやすく解説します!
目次[]
リスクアセスメントとは
リスクアセスメントとは、事業場にある危険性や有害性の特定、リスクの見積り、優先度の設定、リスク低減措置の決定の一連の手順をいい、事業者は、その結果に基づいて適切な労働災害防止対策を講じる必要があります。労働安全衛生法第28条の2では、「危険性又は有害性等の調査及びその結果に基づく措置」として、製造業や建設業等の事業場の事業者は、リスクアセスメント及びその結果に基づく措置の実施に取り組むことが努力義務とされ、その適切かつ有効の実施のために、厚生労働省から「危険性又は有害性等の調査等に関する指針」が公表されています。
検証機器スペック
UR5
可動部重量18.4[kg]、可搬重量5.0[kg]、関節最大角速度180[°/s]、設定可能許容負荷100-250[N]、予防停止検出最長時間250[ms]、直線移動最大速度3.0[m/s]
セーフティーレーザースキャナ
UAM-05LP-T301T301C、北陽電機製、防護領域5.0[m]、検出角度270[°]、ON時最長応答時間5.0[ms]、機能安全 SIL2(Type B、HTF=1)
接触の種類
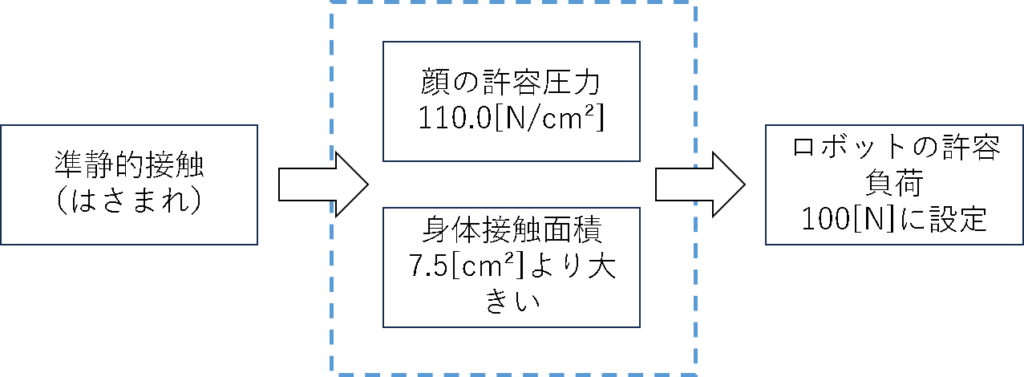
準静的接触
オペレータとロボットシステムとの間の接触であって、オペレータの身体が、ロボットシステムの稼働部と他のロボットセルの固定部または可動部との間で巻き込まれが発生する恐れのある接触。

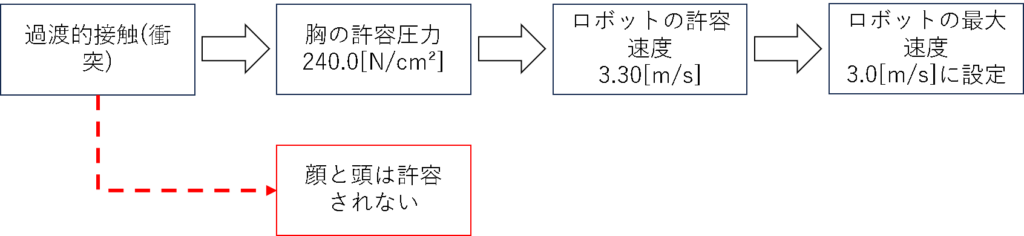
過渡的接触
オペレータとロボットシステムの一部との間の接触であって、オペレータの身体の巻き込まれが発生せずに、ロボットシステムの稼働部から後退できる、または引っ込めることができる接触。
圧力・力は、準静的接触の2倍まで許容可能とされている。ただし、頭部と顔への過渡的接触は許容されない。
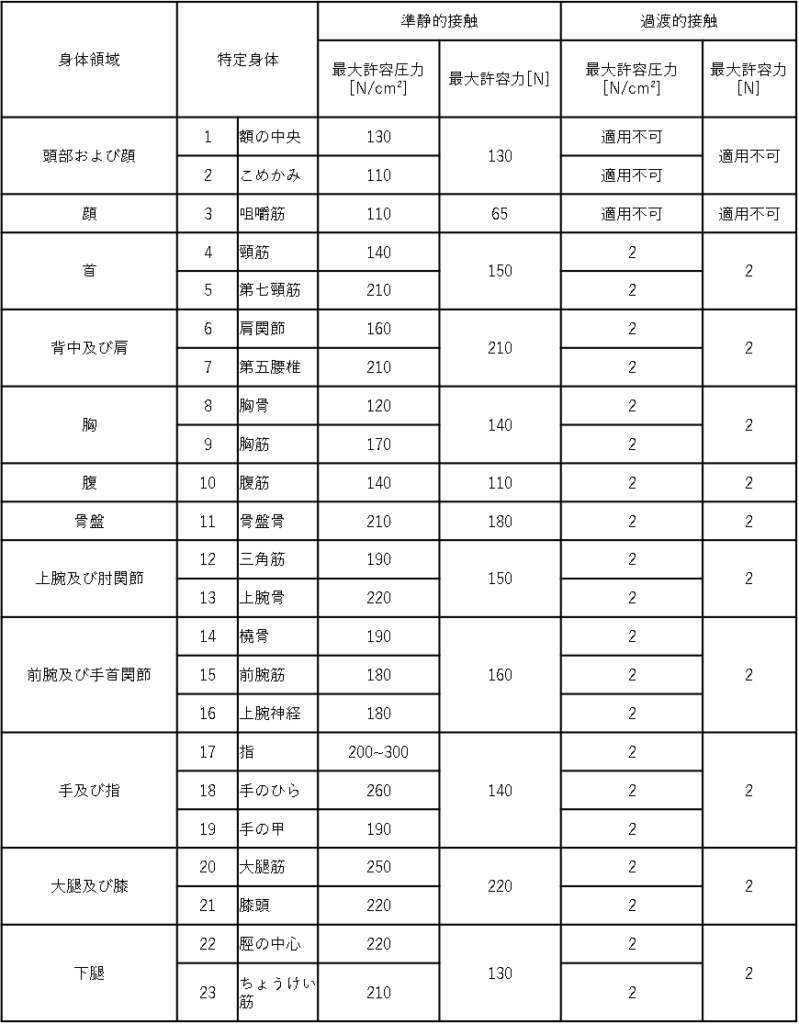
身体で許容される力の参考値
危害の程度と対策
準静的接触
“TS B 0033″によると、危害の程度が軽傷となる最大許容圧力のうち最も低い値が顔の110.0[N/cm²]である。UR5eが人体との接触時、7.5[cm²]程度の面積が接触することが見込まれる。UR5の設定許容負荷は100-250[N]なので、許容負荷を100[N]に設定することで最大許容圧力、接触面積より準静的接触によって生じる危害の程度は軽傷となる。
過渡的接触
“TS B 0033″により、危害の程度が軽傷となる協働ロボットの速度が算出されている。この速度は協働ロボットの可搬重量および協働ロボット可動部の重量、人体の接触面積に依存している。また、顔、額、頭部との過渡的接触は許容されていない。
本システムでの危害の程度が軽傷になる最大許容圧力に基づく協働ロボットの速度のうち、最も値が小さくなるのは胸に当たった場合の0.44[m/s]であり、以下の導出式よりこの値は接触面積[cm²]に比例する。
準静的接触で述べた通り、UR5と人体接触時、7.5[cm」程度の面積を見込むことができ、この際の最大許容圧力に基づく協働ロボットの速度は3.30[m/s]である。UR5の直線移動最大速度は3.0[m/s]であり、各関節の最大速度はこの値を下回る。
以上より、本システム全体で協働ロボットの速度は顔、額、頭部以外の個所では継承となる速度未満に抑えられている。
よって過渡的接触によって顔、額、頭部以外の個所で生じる危害の程度は軽傷となる。顔、額、頭部については接触箇所によって軽傷~重症まで変化するため、重症とする。
保護間隔の距離
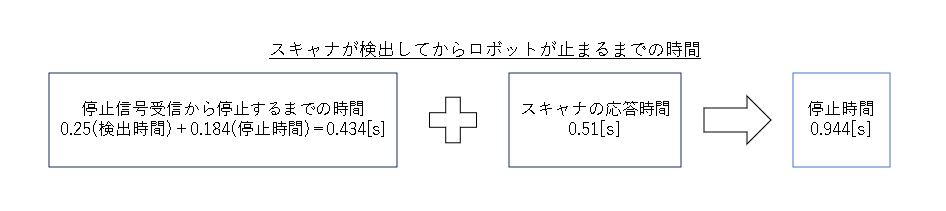
運転時の保護間隔の距離は、UR5とセーフティーレーザースキャナーの仕様に基づき計算を行う。
UR5が信号を受け取り予防停止するまでに必要な時間は最大合計重量が0.145[kg],最大0.184[kg]である。そのため、レーザースキャナが反応して停止するまでに必要な時間は0.944[s]である。
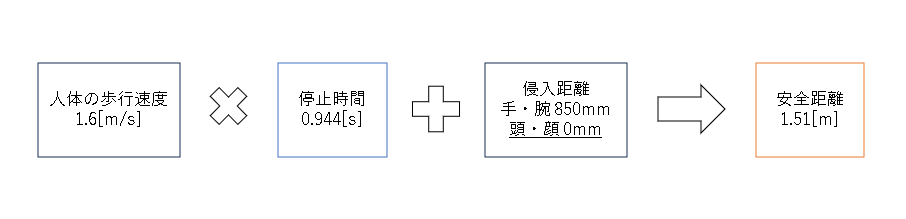
保護間隔を算出する際の人の移動速度は1.6[m/s]で考えるので、人がレーザースキャナの範囲に入ってから移動しうる距離は1.51[m]になる。また、高さ1.0[m]に設定したレーザースキャナに検出されずに上体を乗り出し手を伸ばした場合の標準的な長さは0.85[m]である。
以上から、手・腕に危害を受ける場合の保護間隔は運転空間から2.36[m]
胴・頭部の場合は、1.51[m]で設定する必要がある。
リスクアセスメント実施手順

リスクアセスメントの実施手順は以下の6つの手順で行う。
1. リスクの発生頻度の見積もり
頻発する、しばしば発生する、時々発生する、起こりそうにない、まず起きない、考えられないの6段階で評価する。
2. リスクの危害程度の見積もり
無傷、継承、通院加療、重症・入院治療、志望の5段階で見積もる。
3. リスクの大きさの見積もり
リスクの大きさをC-A3までで見積もる。
Cの場合、対策を講じる必要なし。B1-A3の場合、4を実行する。
4. 設計によるリスクの低減
システムそのもので行うリスクの低減が本項目に該当する。
対策適応後に再度1~3を実行し、結果がB1~A3の場合、5を実行する。
5. 保護手段によるリスクの低減
センサ等外部装置の導入によるリスクの低減が本項目に該当する。
対策適応後に再度1~3を実行し、結果がB1~A3の場合、6を実行する。
6. 使用上の情報によるリスクの低減
運転上の注意、ブザー、ランプといった形のリスクの低減が本項目に該当する。対策適応後に再度1~3を実行する。

まとめ
協働ロボットは人と一緒に作業するため、確実なリスクアセスメントを実施が必要です。産業用ロボットと比較して、安全性が高いですが、リスクはゼロではありません。
iCOM技研の取り組み
弊社は、SIer事業を展開しており、協働ロボットシステムの導入を行っています。弊社は、協働ロボットの販売からソフト開発、ロボットスクールまで行っています。2024年からAI開発にも取り組み始めました。
【お役立ち情報】パレタイザー導入事例BOOK
協働ロボットを用いたパレタイザーの導入事例を紹介しています!
デモ依頼はこちら
自社の製品に合わせたデモの実施も行っております。
デモ依頼・お問い合わせお客様は、お問い合わせフォームよりお問い合わせください。