前回のに引き続き、URCapsの開発Part.3としてツールバー機能の追加について紹介していきたいと思います。
今回は、MyToolbarのサンプルコードを動かし、ツールバー機能の追加ができる状態を目指します。
前回の続き
Part.1 URCaps開発環境のセットアップやチュートリアルについてはこちらをご覧ください。

Part.2 URCapsの楕円パターン生成を行いました。ぜひこちらもご覧ください。

サンプルコードの実行手順

①GitHubよりサンプルコードをエディタにクローンする
②Dokkerを立ち上げ、フォルダを実行
③シミュレータにコードを実装
※詳細はこちら
ツールバーの主な機能
- クイックアクセス:ツールバーを使用することで、メニューをナビゲートすることなく、URCapsの特定の機能に素早くアクセスできます。
- カスタマイズ可能なインターフェース:アプリケーションのニーズに応じて、ツールバーをカスタマイズできます。
- 常に使用可能:追加されたツールバーは、ロボットのインターフェイスの様々な部分に表示され、ユーザにとってアクセスしやすく、一貫性のある機能を提供します。
使用例
AI システムを統合した URCapsでは、画像をキャプチャするためのカメラのボタンや設定を調整するためのボタン、ライブフィードを表示するためのボタンを含むツールバーが設けられています。
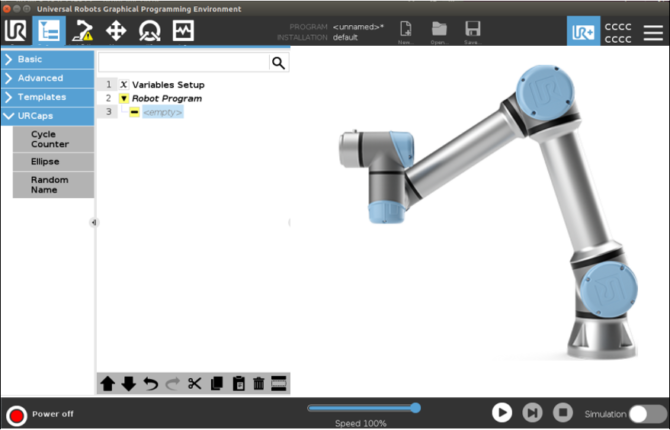
ティーチペンダント(polyscop)画面詳細

MyToolbar をインストールしてシミュレーションを実行したところ、画面の右上に「UR+」という新しいアイコンが表示されるようになりました。

新しいアイコン「UR+」をクリック後の画面。

メッセージ表示の下に配置したボタンを用いてタイマー更新機能を実装しましたが、さらに様々な機能を追加することが可能です。
まとめ
今回はURCaps開発のPart.3として、polyscopのツールバーに機能を追加するサンプルを解説しました。広がり続ける協働ロボットの活躍に伴い、これからもURCapsについては新しい情報を紹介していく予定です。引き続きよろしくお願いいたします。
URCaps開発手順Part.4公開しました。新しい関数を追加する際の手順になります。

iCOM技研の取り組み
iCOM技研はSIer事業を展開しており、協働ロボットシステムの導入を行っています。弊社は、協働ロボットの販売からソフトウェア開発、ロボットスクールまで行っています。2024年からAI開発にも取り組み始めました。
デモ依頼はこちら
自社の製品に合わせたデモの実施も行っております。
デモ依頼・お問い合わせお客様は、お問い合わせフォームよりお問い合わせください。