前回のに引き続き、URCapsの開発Part.4として標準のコマンドセットで直接実行できないカスタムタスクの追加する方法について紹介していきたいと思います。
今回は、Script Function Swingのサンプルコードを動かし、カスタムタスクの追加ができる状態を目指します。
前回の続き
Part.1 URCaps開発環境のセットアップやチュートリアルについてはこちらをご覧ください。

Part.2 URCapsの楕円パターン生成を行いました。ぜひこちらもご覧ください。

Part.3 ツールバー機能の追加を行いました、ぜひこちらもご覧ください。

サンプルコードの実行手順

①GitHubよりサンプルコードをエディタにクローンする
②Dokkerを立ち上げ、フォルダを実行
③シミュレータにコードを実装
※詳細はこちら
カスタムタスクの主な機能
この機能は、標準のコマンドセットで直接実行できないカスタムタスクを追加し実行するために利用されます。
使用例
ロボットに温度を摂氏から華氏へ変換させるなどの特定の計算を行わせ、その結果を基にしてロボットに接続された機器を制御する場合など、直接実行したい関数を追加できます。
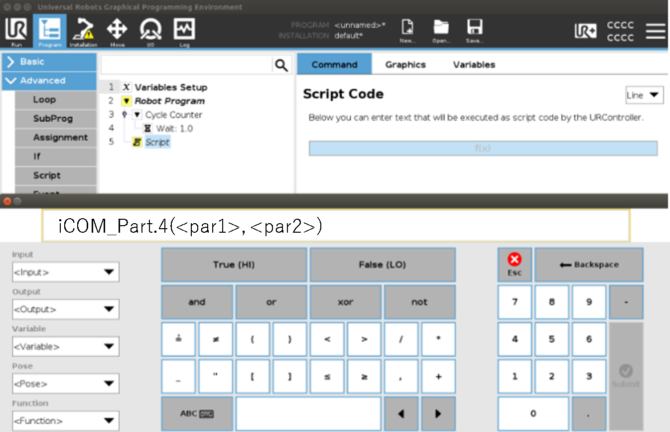
ティーチペンダント(polyscop)画面詳細

polyscopのインストールタブからスクリプト関数チェックボックスを使用して追加する。

プログラムタブに移動し、Advanced>Scriptをクリックし、関数を書き込める状態にする。

右側の黄色い欄をクリックすると以上のような画面が表示され、左下のFunctionという所をクリックします。そうすることで、さまざまな関数が表示されます。カスタマイズした関数(mul())も一覧に表示されます。

一覧から関数を選択すると、インプットできる状態になります。

インプットすることで、プログラムのノードツリーの必要な場所でこの関数を使用できるようになります。
まとめ
標準のコマンドセットで直接実行できないタスクをカスタムタスクから追加することで、プログラムの短縮になり、効率を高めることにつながります。本格的なプログラミングをURCapsで行うには欠かせない機能になるので、ぜひ使いこなしてください。
iCOM技研の取り組み
iCOM技研はSIer事業を展開しており、協働ロボットシステムの導入を行っています。弊社は、協働ロボットの販売からソフトウェア開発、ロボットスクールまで行っています。2024年からAI開発にも取り組み始めました。

デモ依頼はこちら
自社の製品に合わせたデモの実施も行っております。
デモ依頼・お問い合わせお客様は、お問い合わせフォームよりお問い合わせください。