屋外搬送・不整地搬送の自動化へ|SUZUKI MITRA
近年、工場や物流現場では、屋内搬送だけでなく屋外搬送の自動化にも注目が集まっています。 これまでAMRは、主に倉庫内や工場内の平坦な床面で活用されてきました。しかし実際の現場では、建屋間の移動、屋外ヤード内の搬送、資材置 […]
www.icom-giken.com

自動運転車や搬送ロボット、ドローン、測量など、さまざまな分野でLiDARの活用が広がっています。
LiDARは、レーザー光を使って周囲の物体までの距離を測定するセンサー技術です。カメラが周囲を画像として捉えるのに対し、LiDARは空間を「距離情報」として捉える点に特徴があります。
本記事では、LiDARの基本的な仕組み、活用領域、ロボット・搬送用途での役割、メリットや注意点、近年の技術動向について解説します。
目次[]
LiDAR(ライダー)は「Light Detection and Ranging」の略とされ、レーザー光を使って対象物までの距離を測定するセンサー技術です。
カメラが周囲を画像として捉えるのに対し、LiDARは対象物までの距離や空間の形状をデータとして取得します。
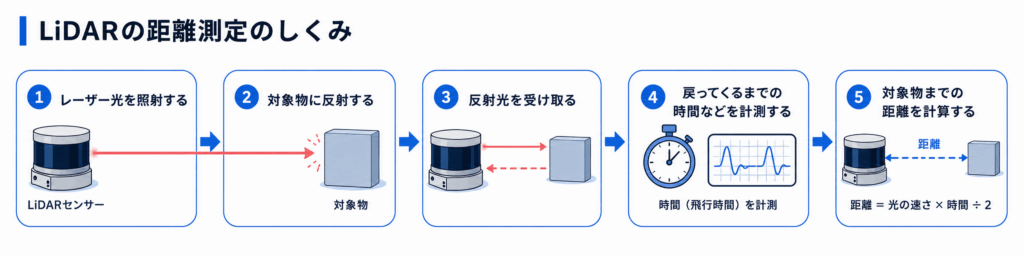
上の図はLiDARによる距離測定の基本的な流れです。この仕組みにより、LiDARは周囲にある物体までの距離を数値として取得できます。
たとえば、ロボットの前方に人や荷物がある場合、LiDARは「前方に何かがある」だけでなく、「どの方向に、どれくらい離れているか」を把握するために使われます。そのため、障害物検知や衝突回避、自己位置推定などに活用されます。
LiDARで取得した距離情報は、空間上の多数の点として表現されます。この点の集まりを「点群データ」と呼びます。
点群データを使うことで、物体の位置や形状、段差、傾斜、周囲の配置などを把握できます。写真のように色や模様を見るのではなく、点の集合として空間構造を捉える点が特徴です。
| 点群データで分かること | 内容 |
|---|---|
| 距離 | 対象物までの距離 |
| 形状 | 壁、柱、車両、荷物などの形 |
| 高さ | 段差、傾斜、立体物の把握 |
| 配置 | 周囲の物体の位置関係 |
| 空間構造 | 通路、障害物、開けた場所 |
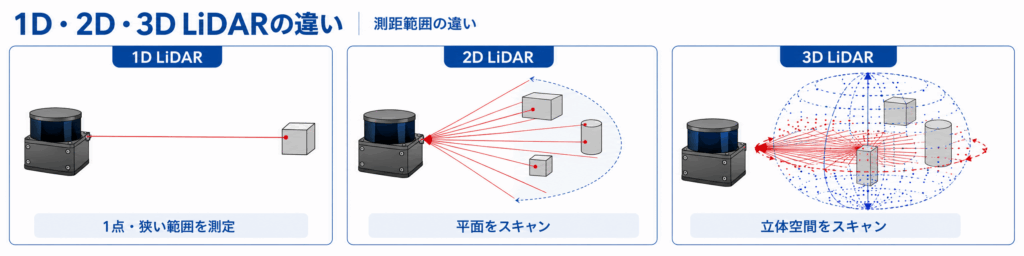
LiDARは、測定できる範囲によって1D、2D、3Dに分けられます。
| 種類 | 測定範囲 | 特徴 | 主な用途 |
|---|---|---|---|
| 1D LiDAR | 点・狭い範囲 | 特定方向の距離を測定する | 距離測定、高さ測定、近接検知 |
| 2D LiDAR | 平面 | 一定の高さで周囲をスキャンする | 屋内AMR、AGV、障害物検知、安全監視 |
| 3D LiDAR | 立体空間 | 水平方向と垂直方向の情報を取得する | 自動運転、屋外搬送、不整地搬送、測量 |
1D LiDARは、特定方向の距離を測る用途に向いています。
2D LiDARは、平面上の障害物検知に使いやすく、屋内搬送ロボットや安全監視で活用されます。
3D LiDARは、高さ方向の情報も取得できるため、段差や傾斜、立体的な障害物の把握に向いています。
屋外搬送や不整地搬送では、地面の凹凸や立体的な障害物を認識する必要があります。そのため、3D LiDARや複数センサーの組み合わせが重要になります。
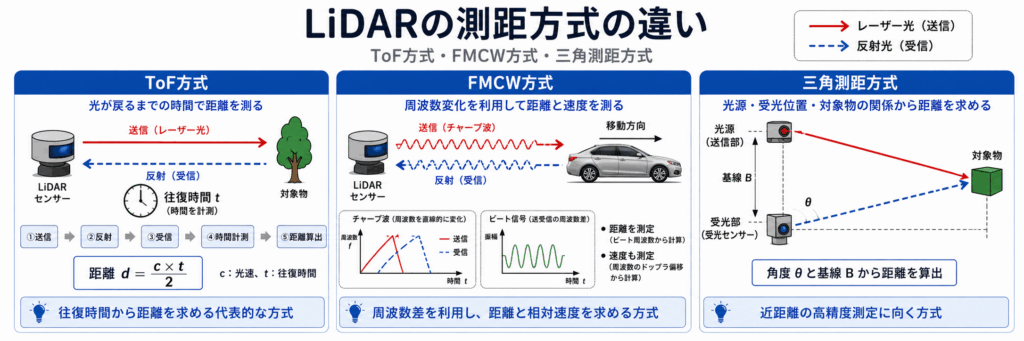
LiDARの測距方式には、主にToF方式、FMCW方式、三角測距方式があります。
| 方式 | 特徴 |
|---|---|
| ToF(飛行時間)方式 | 光が戻ってくるまでの時間から距離を測る方式 |
| FMCW(周波数変調連続波)方式 | 周波数を変化させた光を使い、距離や速度を測る方式 |
| 三角測距方式 | 光源、対象物、受光素子の位置関係から距離を求める方式 |
ToF方式は、光が戻るまでの時間を使って距離を測る方式です。多くのLiDARで使われる代表的な方式です。
FMCW方式は、周波数を変化させた光を使う方式で、距離だけでなく対象物との相対速度も取得しやすい点が特徴です。
三角測距方式は、光源、対象物、受光素子の位置関係から距離を求める方式です。比較的近距離での高精度な測定に向いています。
LiDARは、距離や空間の形状を把握したい分野で活用されています。代表的な活用領域は、自動運転、測量、ドローン、建設、物流、搬送ロボットなどです。
| 活用領域 | 主な用途 |
|---|---|
| 自動運転・モビリティ | 車両、歩行者、障害物の検知 |
| 搬送ロボット・AMR | 障害物検知、自己位置推定、経路計画 |
| 屋外搬送・不整地搬送 | 人、車両、段差、地形の認識 |
| 測量 | 地形、建物、道路などの3Dデータ取得 |
| ドローン | 空撮測量、森林調査、インフラ点検 |
| 建設・土木 | 施工現場の3D計測、出来形管理 |
| 工場・物流 | 安全監視、パレット検知、設備周辺の物体検知 |
自動運転や移動ロボットでは、周囲の車両、人、壁、荷物などを検知し、安全な移動を行うためにLiDARが使われます。特にロボットが自律的に移動する場合は、障害物を検知するだけでなく、自分の位置を推定し、目的地までの経路を判断する必要があります。
ロボットや搬送用途におけるLiDARの役割は、単に距離を測ることだけではありません。取得した距離情報をもとに、ロボットが安全に移動するための判断材料を作ります。
| 役割 | 内容 |
|---|---|
| 障害物検知 | 人、荷物、車両、壁、段差などを検知する |
| 衝突回避 | 障害物との接触を避ける |
| 自己位置推定 | ロボットが現在どこにいるかを推定する |
| マップ作成 | 周囲環境の地図を作る |
| 経路計画 | 目的地までの安全なルートを決める |
| 安全停止 | 危険エリアに物体が入った場合に停止する |
工場や物流現場では、通路上に作業者、台車、パレット、フォークリフトなどが存在します。LiDARは、こうした周囲の物体を検知し、搬送ロボットの減速、停止、回避などの判断に活用されます。
特に屋外搬送では、人や車両の動き、仮置きされた荷物、段差、傾斜、路面の凹凸など、屋内よりも考慮すべき要素が多くなります。そのため、LiDARによるリアルタイムな環境認識が重要になります。
LiDARの大きなメリットは、対象物までの距離を直接測定できることです。カメラが画像情報を取得するのに対し、LiDARは距離や空間形状をデータとして取得できます。そのため、ロボットや自動運転機械が周囲の状況を把握するためのセンサーとして活用されています。
| メリット | 内容 |
|---|---|
| 距離を直接測定できる | 対象物までの距離を数値として把握できる |
| 空間形状を把握できる | 3D LiDARでは立体物や周囲の構造を捉えやすい |
| 障害物検知に活用しやすい | 人、荷物、車両、壁などを検知できる |
| 自己位置推定に使える | 周囲の形状情報をもとにロボットの位置推定に活用できる |
| 暗所でも使いやすい | 可視光に依存しにくく、暗い環境でも距離測定が可能 |
一方で、LiDARは万能なセンサーではありません。使用環境や対象物の条件によっては、検知が不安定になる場合があります。
| 注意点 | 内容 |
|---|---|
| 雨・霧・雪の影響 | レーザー光が散乱し、ノイズや検出低下が起こる場合がある |
| 粉じんの影響 | 浮遊物を障害物として誤検知する可能性がある |
| 黒色・低反射物 | 反射光が弱く、検知しにくい場合がある |
| ガラス・透明物 | 光が透過・反射し、正確に検知しにくい場合がある |
| 死角ができる | センサーの設置位置によって見えない範囲が生じる |
| 点群処理が必要 | 取得したデータを処理するための計算資源が必要になる |
屋外搬送や不整地搬送では、雨、粉じん、路面の凹凸、段差、周囲の車両など、屋内よりも環境条件が複雑になります。そのため、LiDARの性能だけでなく、設置位置、検知範囲、走行速度、停止距離なども含めて検討することが重要です。
また、実際のシステムではLiDARだけに頼るのではなく、カメラ、レーダー、GNSS、IMUなどを組み合わせることもあります。複数のセンサーを組み合わせることで、単一センサーでは苦手な条件を補い、より安定した環境認識につなげることができます。

LiDAR技術は、測距性能の向上だけでなく、小型化、低コスト化、高解像度化、AIとの連携など、さまざまな方向で進化しています。ここでは、近年注目されているLiDAR技術の動向を紹介します。
近年は、可動部を減らしたソリッドステートLiDARや、小型LiDARへの注目が高まっています。
従来のLiDARには、回転機構などを使ってレーザーを走査するタイプが多くありました。一方、ソリッドステートLiDARは機械的な可動部を抑えた構造を目指すため、小型化、耐久性向上、量産性の面で期待されています。
ロボットや車両に搭載する場合、センサーはできるだけ小さく、振動や衝撃にも強いことが求められます。そのため、LiDARの小型化・高信頼化は、今後の自動運転や搬送ロボットの普及に関わる重要な動向です。
LiDARの測距方式の中でも、FMCW LiDARへの注目が高まっています。
移動する車両、人、ロボットなどを検知する場合、「どこにあるか」だけでなく、「どの方向に動いているか」も重要になります。FMCW LiDARは、こうした動きのある対象物を把握する技術として期待されています。
一方で、FMCW LiDARは信号処理や光源制御が複雑になりやすいため、実用化にはコストやシステム構成の課題もあります。
近年は、距離情報だけでなく色情報も取得できるLiDARが登場しています。
従来のLiDARは、対象物までの距離や反射強度を取得することが中心でした。しかし、カラーLiDARでは、3D空間情報に加えて色の情報も取得できます。これにより、ロボットや自動運転システムが、対象物の形状だけでなく、色の違いも含めて周囲を認識しやすくなります。
また、高解像度化も重要な流れです。より細かな点群データを取得できれば、小さな障害物や複雑な形状を捉えやすくなります。自動運転、ロボット、測量、インフラ点検などでは、より高精度な3D認識につながる技術として期待されています。
LiDARは、AIとの連携によってさらに活用範囲が広がっています。
LiDARで取得した点群データをAIで解析することで、人、車両、荷物、障害物、通行可能な領域などを判別しやすくなります。単に距離を測るだけでなく、取得した空間データをもとに「何があるのか」「どこを通れるのか」を判断する方向へ進んでいます。
特にフィジカルAIの分野では、AIが現実空間を理解し、ロボットの行動に反映することが重要になります。そのため、LiDARはロボットが現場環境を把握するための入力情報として、今後さらに重要性が高まると考えられます。
LiDAR単体では、すべての環境を安定して認識できるわけではありません。雨、霧、粉じん、逆光、透明物、低反射物など、環境や対象物によっては検知が不安定になる場合があります。
そのため、近年はLiDAR、カメラ、レーダー、GNSS、IMUなどを組み合わせるセンサーフュージョンが重要になっています。
それぞれのセンサーには得意・不得意があります。LiDARは距離や形状の把握に強く、カメラは色や文字、対象物の種類の認識に強みがあります。レーダーは悪天候下での検知に強みを持つ場合があります。
複数のセンサーを組み合わせることで、単一センサーでは苦手な条件を補い、より安定した環境認識につなげることができます。屋外搬送や不整地搬送のように環境変化が大きい用途では、今後さらに重要になる考え方です。
LiDARは、レーザー光を使って対象物までの距離を測定し、周囲の空間を距離情報として把握するセンサー技術です。
自動運転、測量、ドローン、建設、物流、搬送ロボットなど、幅広い分野で活用されており、特にロボット分野では障害物検知や自己位置推定、安全な移動を支える技術として重要です。
一方で、雨や霧、粉じん、低反射物、透明物などの影響を受ける場合もあるため、用途によってはカメラ、レーダー、GNSS、IMUなどとの組み合わせも必要になります。
今後は、小型化、高解像度化、AIとの連携が進み、LiDARはロボットや自動化システムの空間認識を支える技術として、さらに活用が広がっていくでしょう。

協働ロボットの導入に不安がある方でも、iCOM技研による以下のサポート体制で安心です。
弊社では協働ロボットを中心とした様々なメーカーを取り扱っております。また、最適なロボット選定からシステム開発・立ち上げまで一貫してご支援可能です。
パレタイジング・デパレタイジングに関するお問い合わせ・相談お待ちしております。
「自社にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。
協働ロボット導入をお考えなら、まずはこちら。
初心者の方でも基礎からわかる3つの資料が手に入ります。