ラボオートメーションは、研究所や検査室の定型作業を自動化する取り組みです。t正しくは「ラボラトリーオートメーション(Laboratory Automation)」といいます。対象となる作業には、分注、攪拌、サンプル搬送、測定準備、記録などがあります。これらは研究や検査に欠かせない作業です。一方で、繰り返しが多く、研究者や技術者の負担になりやすい工程でもあります。
そこで、ロボット、分析装置、ソフトウェア、AIを活用した自動化が注目されています。作業を自動化することで、効率化だけでなく、研究環境の改善にもつながります。また、研究者がより専門性の高い業務に集中しやすくなります。
目次[]
ラボオートメーションで自動化される主な工程
ラボオートメーションでは、さまざまな定型作業が自動化の対象になります。主に、サンプルの準備、搬送、測定、記録といった流れで活用されます。
サンプル前処理

サンプル前処理では、分注、希釈、混合、攪拌などを行います。これらは、実験や検査の前段階にあたる重要な工程です。
特に同じ条件で複数のサンプルを扱う場合に、自動化の効果が出やすくなります。自動分注装置やロボットを使えば、決められた手順で処理しやすくなります。
そのため、サンプル前処理はラボオートメーションの代表的な対象といえます。
サンプル搬送・容器ハンドリング
試験管、マイクロプレート、ボトル、チューブなどの移動も自動化の対象です。
たとえば、ロボットアームや搬送装置を使えば、サンプルを保管場所から取り出せます。その後、分析装置や測定装置へセットすることも可能です。さらに、容器の開閉や持ち替えにも応用できます。
このように、人の手に近い作業を自動化できる点が特徴です。
測定装置へのセットと記録

分析装置や測定装置へのサンプルセットも重要な工程です。また、測定後のデータ記録も自動化の対象になります。装置とソフトウェアを連携させれば、測定条件や結果を管理しやすくなります。
その結果、サンプル情報、作業履歴、測定結果を一連の流れで扱えます。
データ管理・ワークフロー管理

近年は、作業そのものだけでなく、データ管理も重要になっています。あわせて、ワークフロー管理の重要性も高まっています。LIMSや電子実験ノートを使えば、実験条件を記録しやすくなります。さらに、画像解析ソフトやAIを組み合わせることで、次の解析にも活用できます。
このように、ラボオートメーションは作業とデータの両面で活用が進んでいます。
ラボオートメーションが求められる背景
ラボオートメーションが求められる背景には、研究環境の変化があります。ここでは、主な理由を整理します。
サンプル数やデータ量が増えている

新薬開発、材料開発、バイオ研究、医療検査では、扱うサンプル数が増えています。同時に、取得するデータ量も増加しています。そのため、多くの実験や検査を正確に進める体制が必要です。
一方で、人手不足や作業負担の増加も課題です。限られた人員で安定した研究・検査体制を維持するには、自動化の活用が重要になります。
繰り返し作業が多い

研究室や検査室では、繰り返し作業が多く発生します。たとえば、分注、サンプルの並べ替え、攪拌、測定装置へのセットなどです。結果の記録も、繰り返し行われる作業の一つです。これらは研究や検査に欠かせません。
しかし、長時間続くと作業者の負担になります。そのため、定型作業をどのように効率化するかが重要です。
再現性と品質が求められる

研究や検査では、同じ条件で作業することが重要です。安定した結果を得るには、作業条件の標準化が欠かせません。
しかし、手作業では作業者ごとのばらつきが発生する場合があります。また、サンプルの取り違えや記録漏れの可能性もあります。
ラボオートメーションを活用すれば、作業条件を標準化しやすくなります。その結果、再現性の向上や品質の安定につながります。
データ活用の重要性が高まっている

実験結果や作業履歴をデータとして蓄積できれば、過去データを活用しやすくなります。また、条件検討やAI解析にもつなげやすくなります。
つまり、ラボオートメーションは作業を自動化するだけではありません。研究データを活用するための基盤としても重要です。
ラボオートメーションのこれまでとこれから
ラボオートメーションは、装置単体の自動化から発展してきました。現在は、ロボット、装置、ソフトウェアを連携させる段階へ進んでいます。
さらに今後は、AIやデータ活用と組み合わせたスマートラボ化が進むと考えられます。
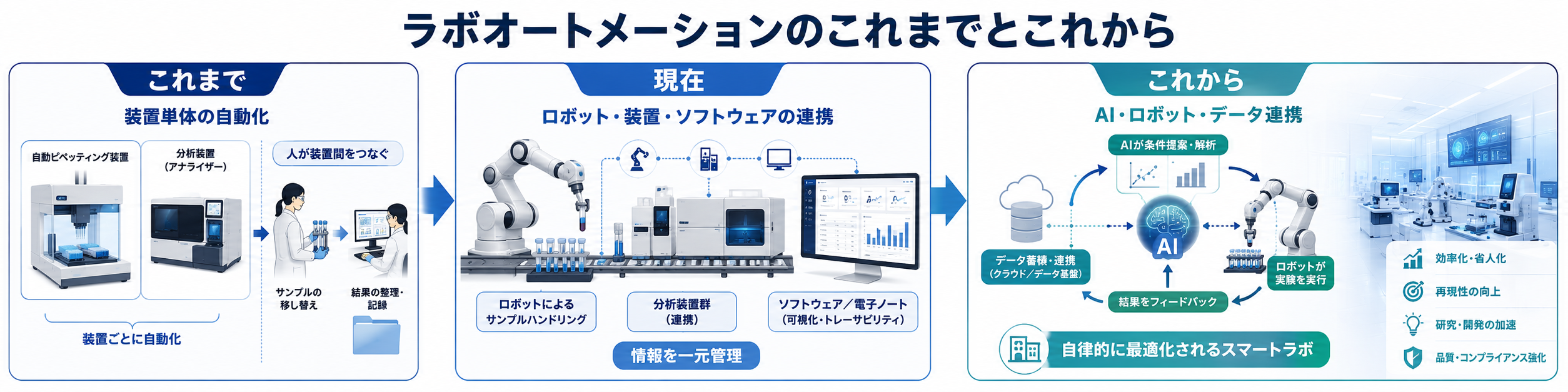
これまでのラボオートメーション:装置単体の自動化
これまでのラボオートメーションは、装置単体の自動化が中心でした。代表例として、自動分注装置や自動分析装置があります。分注、測定、サンプル保管など、特定の作業を効率化してきました。これにより、作業時間の短縮や品質の安定に貢献してきました。
一方で、装置間のサンプル移動は人が行うケースも多くありました。また、結果の整理も人が担当することがありました。そのため、ラボ全体の効率化には課題が残っていました。
現在のラボオートメーション:ロボット・装置・ソフトウェアの連携
現在のラボオートメーションは、複数の技術を連携させる段階です。ロボットアーム、分析装置、搬送装置、ソフトウェアを組み合わせます。特にロボットアームは、人の手に近い作業を自動化しやすい点が特徴です。試験管や容器の搬送、キャップ開閉、攪拌などに活用できます。さらに、装置へのセット作業にも対応しやすくなります。
また、LIMSや電子実験ノートを組み合わせれば、情報管理もしやすくなります。サンプル情報、測定条件、作業履歴を一元的に管理できます。その結果、作業の見える化やトレーサビリティ向上につながります。
これからのラボオートメーション:AI・ロボット・データ連携へ
これからのラボオートメーションは、スマートラボへ進むと考えられます。
その中心になるのが、AI、ロボット、データの連携です。実験結果や作業履歴をデータとして蓄積すれば、次の実験に活用できます。さらに、AIが次の実験条件を提案することも期待されます。これにより、研究開発のスピード向上が期待できます。
将来的には、自律型ラボへの発展も見込まれます。自律型ラボでは、AIが実験条件を考えます。そして、ロボットが実験を行います。その結果をAIが解析し、次の実験へ反映します。
ラボオートメーションは、人を置き換えるための自動化ではありません。研究者が単純作業から解放されるための技術です。そして、より専門性の高い業務に集中できる環境づくりにもつながります。
今後、研究開発を支える仕組みとして、さらに重要性が高まっていくでしょう。
ラボオートメーションのメリットと注意点
ラボオートメーションには、作業効率化や品質安定などのメリットがあります。一方で、導入する工程や運用方法によっては、期待した効果が出にくい場合もあります。導入前には、対象作業や現場条件を整理しておくことが重要です。
ラボオートメーションの活用で作業負担を軽減

ラボオートメーションを活用すれば、分注、攪拌、搬送、測定準備などの定型作業を自動化できます。
特に、同じ作業を長時間繰り返す工程では、研究者や技術者の負担を軽減しやすくなります。作業者が手作業に追われる時間を減らせるため、現場全体の働きやすさにもつながります。
ただし、すべての作業を一度に自動化する必要はありません。まずは、作業頻度が高く、負担の大きい工程から検討することが重要です。
ラボオートメーションによる作業品質の安定

ラボオートメーションでは、決められた手順で作業を繰り返しやすくなります。
分注量、攪拌時間、搬送位置などを一定に保ちやすくなるため、作業者ごとのばらつきを抑えやすくなります。特に、同じ条件で繰り返し行う実験や検査では、品質の安定に役立ちます。
一方で、容器の形状、液体の粘度、薬品の性質によっては、事前検証が必要です。現場で使用している試薬や器具に合わせて、安定して動作する条件を確認しておく必要があります。
ラボオートメーションで減少する人的ミス

手作業では、サンプルの取り違え、分注量の誤差、記録漏れなどが発生する可能性があります。ラボオートメーションを導入すれば、決められた手順に沿って作業を進めやすくなります。また、作業履歴をデータとして残せる仕組みと組み合わせれば、確認や追跡もしやすくなります。
ただし、自動化しても設定ミスや容器の置き間違いは起こり得ます。そのため、作業開始前の確認手順や、異常時に停止できる仕組みを整えておくことが重要です。
ラボオートメーションの活用で研究者が本来の業務に集中できる
ラボオートメーションの大きな価値は、研究者を単純作業から解放できる点です。
分注や搬送などの定型作業を自動化することで、研究者は実験計画、結果の考察、データ解析、新しいテーマの検討に時間を使いやすくなります。これは、研究環境の改善や人材定着にもつながります。
一方で、導入後の操作や保守が複雑になると、かえって現場の負担が増える場合もあります。誰が操作するのか、どの工程を自動化するのか、保守をどう行うのかを事前に整理しておくことが大切です。
自動化事例:UR3eによるラボ作業の自動化
ラボオートメーションの一例として、ロボットアームを使った作業自動化があります。研究室や検査室では、試験管の搬送、容器のセット、キャップ開閉、攪拌など、手作業で行われる工程が多くあります。これらの作業は繰り返しが多いため、小型ロボットとの相性が高い領域です。
ここでは、Universal Robotsの小型協働ロボット「UR3e」を例に、ラボ作業への応用を紹介します。
UR3eの特徴
UR3eは、Universal Robotsのe-Seriesの中でも小型・軽量な協働ロボットです。
可搬重量は3kg、リーチは500mm、本体重量は11.2kgです。設置面積も小さく、作業台の上や装置の近くにも配置しやすいモデルです。
また、繰り返し精度は±0.03mmです。そのため、試験管や小型容器を決まった位置へ搬送する作業にも活用しやすい特徴があります。
さらに、UR3eはリスト6軸が無限回転できる点も特徴です。先端軸を連続して回転できるため、回す、締める、開けるといった動作にも応用しやすくなります。
ラボでは、既存の実験台や分析装置をそのまま使いたいケースもあります。UR3eのような小型協働ロボットであれば、限られたスペースでも導入を検討しやすくなります。

先端軸無限回転がラボ作業に向いている理由
UR3eの大きな特徴が、先端軸の無限回転です。ツールフランジ部を連続回転できるため、回す、ひねる、締めるといった動作を行いやすくなります。これは、人が手首を使って行う作業に近い動きです。ラボ作業では、試験管や小型容器を持つ、回す、装置へセットする、キャップを開閉するといった作業が多くあります。
たとえば、試験管をつかんで測定装置へセットする作業や、キャップを連続的に回して開閉する作業に応用できます。また、容器を一定方向に回転させることで、攪拌に近い動作にも活用できます。
このように、UR3eは単なるピックアンドプレースだけでなく、回転を伴うラボ作業にも対応しやすいロボットです。
UR3eの特徴・スペックまとめ
| 項目 | UR3eの仕様・特徴 | ラボ用途での活かし方 |
|---|---|---|
| 可搬重量 | 3kg | 試験管、小型容器、治具の搬送に適している |
| リーチ | 500mm | 作業台上や装置周辺の作業に対応しやすい |
| 本体重量 | 11.2kg | 限られたスペースにも設置しやすい |
| 設置面積 | Ø128mm | 既存の実験台や装置横に配置しやすい |
| 繰り返し精度 | ±0.03mm | 決まった位置への搬送やセットに向いている |
| リスト6軸回転 | 無限回転 | キャップ開閉、攪拌、回転検査に応用しやすい |
| 用途例 | 実験・ラボラトリー、教育・研究用途 | 研究室や検査室の定型作業に活用しやすい |
まとめ
ラボオートメーションは、研究所や検査室で発生する分注、攪拌、サンプル搬送、測定準備、記録などの定型作業を自動化する取り組みです。作業効率の向上だけでなく、作業負担の軽減、再現性の向上、人的ミスの低減にもつながります。
これまでのラボオートメーションは、装置単体の自動化が中心でした。しかし現在は、ロボット、分析装置、ソフトウェア、AIを連携させ、ラボ全体のワークフローを効率化する段階へ進んでいます。今後は、データ活用やAI解析と組み合わせたスマートラボ化もさらに進むと考えられます。
また、UR3eのような小型協働ロボットを活用すれば、限られたスペースでもラボ作業の自動化を検討しやすくなります。特に、先端軸の無限回転を活かすことで、試験管の搬送、キャップ開閉、攪拌に近い回転動作などにも応用しやすい点が特徴です。
ラボオートメーションは、人を置き換えるための自動化ではありません。研究者や技術者が単純作業から解放され、より専門性の高い業務に集中できる環境をつくるための手段です。研究環境の改善や自動化をご検討の際は、まずは負担の大きい工程から見直してみてはいかがでしょうか。
iCOM技研による導入サポート|ラボ自動化の「壁」を取り除く
協働ロボットの導入に不安がある方でも、iCOM技研による以下のサポート体制で安心です。
- 使用目的に合ったモデル選定のコンサルティング
- 導入前の実機デモ・テストで効果を可視化
- ロボット操作教育、安全指導まで含めた現場立ち上げ支援
- ロボットシステム全体の提案(ハンドツール選定)
弊社では協働ロボットを中心とした様々なメーカーを取り扱っております。また、最適なロボット選定からシステム開発・立ち上げまで一貫してご支援可能です。
ラボラトリーオートメーションに関するお問い合わせ・相談お待ちしております。
「自研究室にも自動化を」とお考えの方は、ぜひお気軽にご相談ください。