産業用ロボットを用いて、シームレス鋼管製造過程で発生するを除去する研削プロセスの自動化にJFEスチールが取り組んでいます。今回はそんな自動化事例について紹介していきたいと思います。
シームレス鋼管製造における研削プロセスの自動化
シームレス鋼管製造工程とは

シームレス鋼管は、溶接による接合部が一切ない鋼管のことで、特に高い強度と耐久性を必要とする分野で重宝されています。しかしながら、製造過程で表面に微細な傷が発生することがあり、その修正が不可欠です。従来、この「手入れ」工程は、人間の作業者が電動グラインダーを使い、手作業で行っていました。このプロセスは時間と労力を要し、さらに作業者には高い熟練度が求められていました。また、砥石やその破片で受傷してしまうリスクもありました。

ロボット研削システムの主要機能

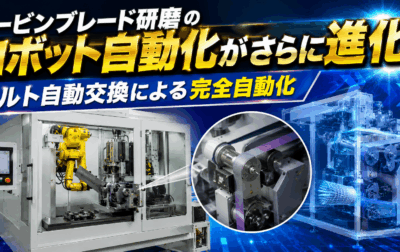
今回導入されたシステムは、鋼管を上からアプローチするガントリー型のスライダーレイアウトを採用しています。ロボットアームはこのスライダーに取り付けられ、鋼管の長さに沿って移動し、表面の欠陥部分を研削します。最大29メートルに達する鋼管にも対応可能で、傷の発生箇所に応じて鋼管を回転させながら研削を行うことができます。
このプロセスには力制御装置も組み込まれており、研削中に一定の圧力を保つことで、表面が滑らかになるよう調整されています。これにより、手作業に比べてムラが少なく、より均一な仕上がりが実現しています。
表面欠陥の検出と3Dスキャン技術

研削プロセスに先立ち、欠陥部分を正確に検出するための「蛍光磁粉探傷法」が使用されています。この技術では、磁性粉末を使って鋼管の表面を検査し、傷のある部分を蛍光反応で浮かび上がらせます。その後、作業者が欠陥部分をマークし、このマークを基にロボットが3Dスキャナーで表面形状を計測します
精密な研削を可能にする力制御技術
研削作業では、欠陥の深さを直接測定することが難しいため、JFEスチールは力制御技術を導入しました。この技術により、研削時の圧力を一定に保つことで、研削深さを間接的に制御しています。ロボットアームの先端に取り付けられた空気圧式の力制御装置により、表面形状に合わせて研削が行われ、欠陥部分を滑らかに整えることができます。

従来の手作業では、研削した部分と未研削部分との間に段差が発生することがありましたが、力制御によりこの段差を大幅に削減することに成功しました。これにより、表面の滑らかさが向上し、製品の品質も高まりました。
用いられている力制御装置について、こちらで詳しく紹介しています。

安全性と効率性の向上
研削作業は、高速回転するグラインダーを使用するため、作業者にとっては危険が伴います。特に、研削中に砥石が破損するリスクがあるため、作業環境は安全とは言えませんでした。しかし、ロボットによる自動化により、この危険な作業から作業者を解放し、事故のリスクを大幅に減少させることができました。
まとめ
JFEスチールはシームレス鋼管の研削プロセスに産業用ロボットを用いた自動化に取り組みました。この取り組みは、研削における安全性と効率を高める画期的な取り組みです。危険度が高い工程の自動化は鉄鋼業界では欠かせないものになっています。簡単にロボットに教示できない環境こそ、ティーチングレスシステムやFer Roboticsのような制御ツールの活用が有効的です。
参考資料
iCOM技研の取り組み
iCOM技研はSIer事業を展開しており、協働ロボットシステムの導入を行っています。弊社は、協働ロボットの販売からソフトウェア開発、ロボットスクールまで行っています。2024年からAI開発にも取り組み始めました。
ロボットハンドを徹底解説! – iCOM技研ブログ今回は、ロボットハンドについて徹底解説!ロボットハンドの種類と特徴、ロボットハンドメーカーについても紹介していますwww.icom-giken.com

デモ依頼はこちら
自社の製品に合わせたデモの実施も行っております。
デモ依頼・お問い合わせお客様は、お問い合わせフォームよりお問い合わせください。